
1. ¿Qué es latencia?
La latencia es cuánto tiempo le toma a la PC detener lo que esta haciendo y responder a una solicitud externa, como ejecutar uno de los hilos periódicos en tiempo real de LinuxCNC. Cuanto menor sea la latencia, más rápido se ejecutarán los hilos en tiempo real y más suave será el movimiento (y potencialmente más rápido, en caso de pasos por software).
La latencia es mucho más importante que la velocidad de la CPU. Un humilde Pentium II que responde siempre a las interrupciones en 10 us puede dar mejores resultados que una bestia más reciente y rápida de P4 Hyperthreading.
La CPU no es el único factor para determinar la latencia. Las placas base, tarjetas de video, puertos USB y un número de otros factores puede dañar la latencia. La mejor manera de averiguar con cuánta se esta tratando, es ejecutar la prueba de latencia.
Generar pulsos de paso en software tiene una gran ventaja: es gratis. Casi todas las PC que tienen un puerto paralelo son capaces de emitir pulsos de pasos generados por el software.
However, software step pulses also have some disadvantages:
-
velocidad de paso máxima limitada
-
jitter (fluctuaciones) en los pulsos generados
-
añade carga a la CPU
2. Pruebas de latencia
LinuxCNC incluye varias pruebas de latencia. Todas producen información equivalente. Ejecutar estas pruebas ayudará a determinar si una computadora es adecuada para controlar una máquina CNC.
|
Note
|
No ejecute LinuxCNC o StepConf mientras se ejecuta la prueba de latencia. |
2.1. Prueba de latencia
The latency test can be run a few different ways.
If you are using PnCconf to configure your machine, you can launch the Latency Test by clicking the "Test Base Period Jitter button' during the 2nd step of the process.
If you are using StepConf to configure your machine, you can launch the Latency Test by clicking the "Test Base Period Jitter button' during the 2nd step of the process.
If you want to run the test from the command line, open a terminal window (in Ubuntu, from Applications → Accessories → Terminal) and run the following command:
latency-test
Esto iniciará la prueba de latencia con un período base de hilo de 25 µs y un período servo-hilo de 1 ms. Los tiempos de período pueden ser especificados en la línea de comandos:
latency-test 50000 1000000
Esto iniciará la prueba de latency con un período base de hilo de 50 µs y un período de servo-hilo de 1 ms.
Para opciones disponibles, ingresar en la línea de comandos:
latency-test -h
Después de iniciar la prueba de latencia deberías ver algo como esto:
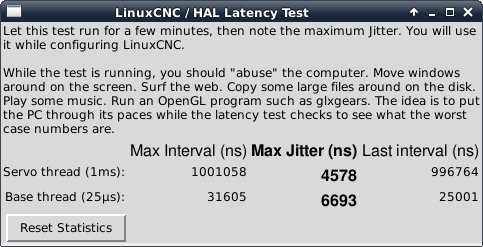
Mientras se ejecuta la prueba, debes abusar de la computadora. Mueve las ventanas alrededor de la pantalla. Navega por la web. Copia algunos archivos grandes en el disco. Pon música. Ejecuta un programa OpenGL como glxgears. La idea es poner la PC en aprietos mientras la prueba de latencia comprueba cuáles son los peores números.
Los números importantes son los de la columna max jitter (máxima fluctuación). En el ejemplo anterior, son 6693 nanosegundos (ns), o 6.693 microsegundos (µs). Anota este número e ingrésalo en StepConf cuando se solicite.
En el ejemplo, la prueba de latencia solo se ejecutó durante unos segundos. Debe ejecutar la prueba durante al menos varios minutos; a veces el peor de los casos de latencia no ocurre con frecuencia, o solo ocurre cuando se verifica alguna acción particular. Por ejemplo, una placa madre Intel funcionaba bastante bien la mayor parte del tiempo, pero cada 64 segundos tenía una latencia muy mala de 300 µs. Afortunadamente eso fue reparable; vea [_latency_tunning].
So, what do the results mean?
If your Max Jitter number is less than about 20,000 nanoseconds, the computer should give very nice results with software stepping or a dedicated hardware card such as a Mesa Anything I/O card.
If the Max Jitter number is between 20,000 and 50,000 nanoseconds, you can still get good results with software stepping, but your maximum step rate might be a little disappointing, especially if you use microstepping or have very fine pitch leadscrews. You can, however, achieve excellent results using a hardware card.
If the Max Jitter number is between 50,000 and 500,000 nanoseconds, you cannot use software stepping. You can, however, achieve acceptable results using a hardware card.
If the Max Jitter number is above 500,000 nanoseconds, you cannot use software stepping or a hardware card with LinuxCNC and achieve acceptable results.
|
Note
|
If you get high numbers, there may be ways to improve them. Another PC had very bad latency (several million nanoseconds) when using the onboard video. But a $5 used video card solved the problem. LinuxCNC does not require bleeding-edge hardware. |
Para obtener más información sobre la afinación de pasos, consulta el capítulo Afinación de motores a pasos.
|
Tip
|
Hay herramientas adicionales disponibles desde la línea de comandos para examinar la latencia cuando LinuxCNC no está corriendo. |
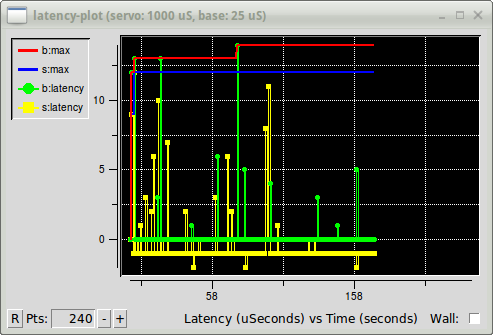
2.2. Gráfica de latencia
latency-plot crea una gráfica de barras registrando los hilos base y servo. Puede ser útil para ver picos de latencia cuando se inician o se usan otras aplicaciones. Uso:
latency-plot --help
Usage:
latency-plot --help | -?
latency-plot --hal [Options]
Options:
--base ns (base thread interval in nanoseconds, default: 25000)
--servo ns (servo thread interval in nanoseconds, default: 1000000)
--time ms (report interval in milliseconds, default: 1000)
--relative (relative clock time (default))
--actual (actual clock time)
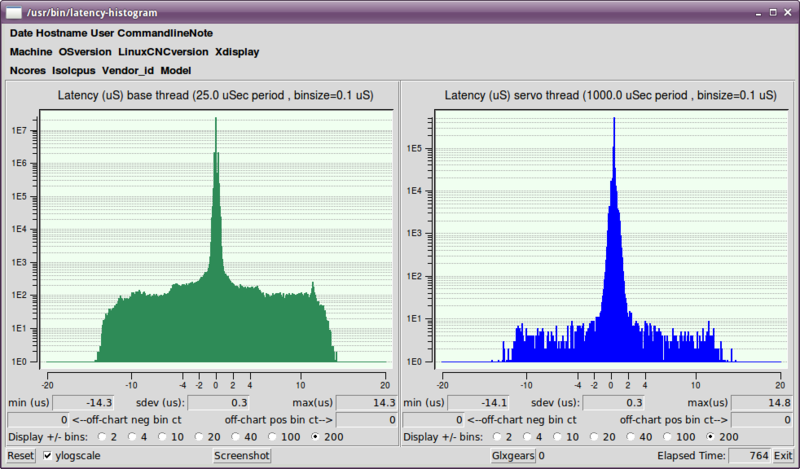
latency-plot2.3. Histograma de latencia
latency-histogram muestra un histograma de latencia (jitter) para hilos base y servo.
Usage: latency-histogram --help | -? latency-histogram [Options] Options: --base ns (base thread interval in nanoseconds, default: 25000, min: 5000) --servo ns (servo thread interval in nanoseconds, default: 1000000, min: 25000) --bbinsize ns (base bin size in nanoseconds, default: 100 --sbinsize ns (servo bin size in nanoseconds, default: 100 --bbins n (base bins, default: 200 --sbins n (servo bins, default: 200 --logscale 0|1 (y axis log scale, default: 1) --text note (additional note, default: "" ) --show (show count of undisplayed bins) --nobase (servo thread only) --verbose (progress and debug) --nox (no gui, display elapsed,min,max,sdev for each thread)
|
Note
|
When determining the latency, LinuxCNC and HAL should not be running, stop with halrun -U. Large number of bins and/or small binsizes will slow updates. For single thread, specify --nobase (and options for servo thread). Measured latencies outside the +/- bin range are reported with special end bars. Use --show to show count for the off-chart [pos|neg] bin.
|
latency-histogram2.4. Realtime status bar
The latency-test and latency-histogram windows show a status bar along the bottom with three fields. A field turns red when it indicates a condition that makes the measured latency unrepresentative of a properly configured realtime system.
- En tiempo real
-
The realtime type that rtapi is running, as reported by
realtime verify, for examplePreempt RT,RTAIorXenomai. It readsNo realtime(red) whenrtapi_appcannot obtain realtime scheduling, either because the running kernel is not a realtime kernel (see Kernel and Version requirements) or becausertapi_applacks the required privileges on a run-in-place build (see Realtime, runsudo make setuidorsudo make setcap). In this state the figures reflect ordinary, non-realtime scheduling and will be far worse than a realtime kernel delivers. For testing only, realtime can be forced with theLINUXCNC_FORCE_REALTIME=1environment variable. - CPU governor
-
The active CPU frequency governor. It is shown in red when it is not
performance, because frequency scaling lets the CPU drop to a lower clock speed and adds latency spikes. See CPU frequency governor. - isolcpus
-
Whether any CPUs are isolated for the exclusive use of LinuxCNC (
isolcpus=...) or not (no_isolcpus). Isolating a CPU keeps other tasks off it and improves latency; see Tuning Preempt-RT for latency.
3. Ajuste de latencia
LinuxCNC puede correr en muchas plataformas de hardware distintas y con diferentes kernels de tiempo real, y todas ellas se pueden beneficiar del ajuste de latencia óptima.
El primer objetivo es ajustar el sistema para que LinuxCNC reserve un CPU para uso exclusivo de las tareas en tiempo real de LinuxCNC, para que otras tareas (tanto programas de usuario como hilos del kernel) no interfieran con los accesos al CPU de LinuxCNC.
Cuando se cree que opciones específicas de ajuste son universalmente de ayuda, LinuxCNC realiza automáticamente este ajuste en el arranque, pero muchas opciones de ajuste son específicas de la máquina y no pueden realizarse automáticamente. La persona que instale LinuxCNC necesita determinar experimentalmente el ajuste óptimo para su sistema.
3.1. Ajustar el BIOS para latencia
Los BIOSes de PCs varían salvajemente en su comportamiento de latencia.
Ajustar el BIOS es tedioso porque tienes que reiniciar la computadora, hacer un pequeño ajuste en el BIOS, arrancar Linux, y ejecutar la prueba de latencia (potencialmente por mucho tiempo) para ver qué efecto tuvo tu cambio en el BIOS. Luego repetir para todas las otras configuraciones de BIOS que quieras intentar.
Ya que los BIOSes son todos diferentes y no estándar, no es práctico proporcionar una guía detallada de ajuste de BIOS. En general, algunas cosas a intentar ajustar en el BIOS son:
-
Deshabilitar ACPI, APM y cualquier otra prestación de ahorro de energía. Esto incluye cualquier cosa relacionada con ahorro de energía, suspensión, estados de reposo de la CPU, escalamiento de frecuencia de la CPU, etc.
-
Deshabilitar modo "turbo" de la CPU.
-
Deshabilitar hyper-threading de la CPU.
-
Deshabilitar (o de otro modo, controlar) Interrupción de Gerencia de Sistema (SMI).
-
Deshabilitar cualquier hardware que no pretendas usar.
3.2. CPU frequency governor
Frequency scaling lets the CPU lower its clock speed to save power, which adds latency while the CPU ramps back up to service a realtime thread. For the best latency, set the governor to performance on every CPU:
echo performance | sudo tee /sys/devices/system/cpu/cpu*/cpufreq/scaling_governor
This setting does not survive a reboot. To make it permanent, apply it at boot with a small systemd service, or with a CPU frequency management tool such as cpupower (Debian/Ubuntu package linux-cpupower) or tuned.
3.3. Ajustar Preempt-RT para latencia
El kernel Preempt-RT puede beneficiarse del ajuste con tal de proporcionar la mejor latencia para LinuxCNC. Se puede realizar el ajuste por medio de la línea de comandos de kernel, sysctl, y por medio de archivos en /proc y /sys.
Algunos parámetros de ajuste a considerar:
- Línea de comando de kernel
-
Detalles aquí: https://www.kernel.org/doc/Documentation/admin-guide/kernel-parameters.txt
-
isolcpus: Previene que la mayoría de procesos que no son de LinuxCNC usen esas CPUs, dejando más tiempo de CPU disponible para LinuxCNC. -
irqaffinity: Selecciona cuáles CPUs sirven interrupciones, para que los CPUs reservados para tiempo real de LinuxCNC no tengan que realizar esta tarea. -
rcu_nocbs: Previene que las retrollamadas RCU se ejecuten en estas CPUs. -
rcu_nocb_poll: Encuesta retrollamadas de RCU en lugar de usar dormir/despertar. -
nohz_full: Desabilita el tictac del reloj en estas CPUs.
-
- Sysctl
-
Detalles aquí: https://www.kernel.org/doc/html/latest/scheduler/sched-rt-group.html
-
sysctl.kernel.sched_rt_runtime_us: Establece a -1 para eliminar el límite de cuánto tiempo pueden usar las tareas en tiempo real.
-