Updating LinuxCNC to a new minor release (ie to a new version in the same stable series, for example from 2.9.7 to 2.9.8) is an automatic process if your PC is connected to the internet. You will see an update prompt after a minor release along with other software updates. If you don’t have an internet connection to your PC see Updating without Network.
1. Обновление до новой версии
В этом разделе описывается, как обновить LinuxCNC с версии 2.8.x до версии 2.9.y. Предполагается, что у вас есть установленная версия 2.8, которую вы хотите обновить.
Чтобы обновить LinuxCNC с версии старше 2.8, вам необходимо сначала обновление старой установки до 2.8, а затем следовать этим инструкциям. для обновления до новой версии.
Если у вас нет старой версии LinuxCNC для обновления, лучше всего выполнить новую установку новой версии, как описано в разделе Getting LinuxCNC.
Furthermore, if you are running Ubuntu Precise, Debian Wheezy or Debian Buster it is well worth considering making a backup of the "linuxcnc" directory on removable media and performing a clean install of a newer OS and LinuxCNC version as these releases were EOL in 2017, 2018 and 2022 respectively. If you are running on Ubuntu Lucid then you will have to do this, as Lucid is no longer supported by LinuxCNC (it was EOL in 2013).
Чтобы обновить основные версии, такие как 2.8, до 2.9, когда у вас есть сетевое соединение на компьютере, вам необходимо отключить старые источники apt linuxcnc.org в файле /etc/apt/sources.list и добавить новый источник apt linuxcnc.org для 2.9. , затем обновите LinuxCNC.
Детали будут зависеть от того, на какой платформе вы работаете. Откройте terminal, затем введите lsb_release -ic, чтобы найти эту информацию:
lsb_release -ic
Distributor ID: Debian
Codename: TrixieYou should be running on Debian Bullseye, Bookworm or Trixie or Ubuntu 20.04 "Focal Fossa" or newer. LinuxCNC 2.9.y will not run on older distributions than these.
Вам также нужно будет проверить, какое используется ядро реального времени:
uname -r
6.1.0-10-rt-amd64Если вы видите (как указано выше) -rt- в имени ядра, значит, вы используете ядро preempt-rt и вам следует установить версию LinuxCNC "uspace". Вам также следует установить uspace для конфигураций "sim" на ядрах, не работающих в реальном времени.
Если вы видите -rtai- в имени ядра, значит, вы используете RTAI в реальном времени. См. ниже версию LinuxCNC для установки. Пакеты RTAI доступны для Bookworm и Buster, но в настоящее время недоступны для Bullseye.
1.1. Конфигурация источников Apt
-
Откройте окно
Software Sources. Этот процесс немного отличается на трех поддерживаемых платформах:-
Debian:
-
Нажмите
Applications Menu, затемSystem, затемSynaptic Package Manager. -
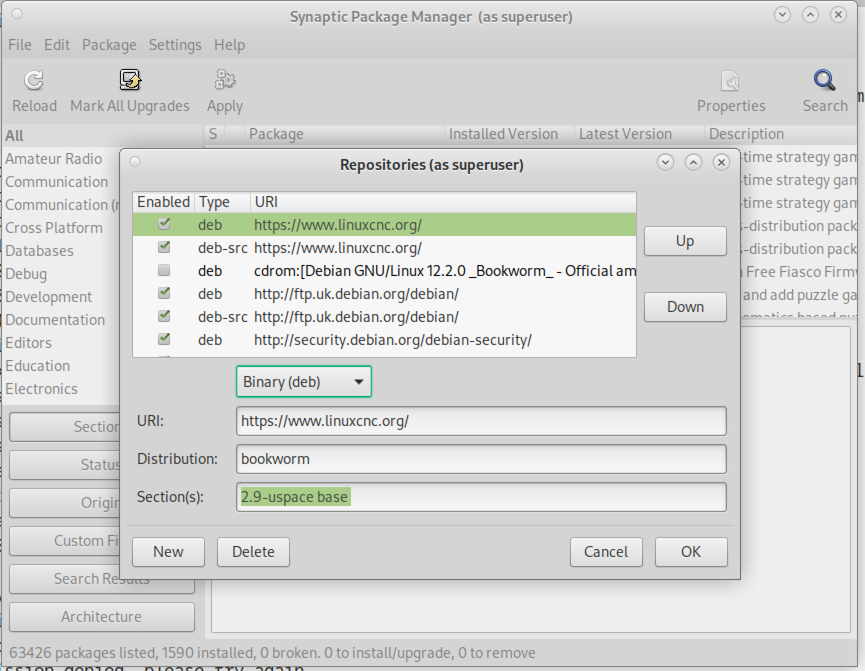
В Synaptic нажмите меню
Settings, затем нажмитеRepositories, чтобы открыть окноSoftware Sources.
-
-
Ubuntu Precise:
-
Нажмите на значок
Dash Homeв левом верхнем углу. -
В поле
Searchвведите "software", затем щелкните значокUbuntu Software Center. -
В окне Ubuntu Software Center нажмите меню
Edit, затем нажмитеSoftware Sources..., чтобы открыть окноSoftware Sources.
-
-
Ubuntu Lucid:
-
Откройте меню
System, затемAdministration, затемSynaptic Package Manager. -
В Synaptic нажмите меню
Settings, затем нажмитеRepositories, чтобы открыть окноSoftware Sources.
-
-
-
В окне
Software Sourcesвыберите вкладкуOther Software. -
Удалите или снимите флажки со всех старых записей linuxcnc.org (оставьте все строки, отличные от linuxcnc.org, как есть).
-
Нажмите кнопку
Addи добавьте новую строку apt. На разных платформах строка будет немного отличаться:
| OS / Realtime Version | Repository |
|---|---|
Debian Bullseye - preempt |
|
Debian Bookworm - preempt |
|
Debian Bookworm - RTAI |
|
Debian Trixie - preempt |
|
Debian Trixie - RTAI |
|
-
Нажмите
Add Source, затемCloseв окне Software Sources. Если появится окно с сообщением о том, что информация о доступном программном обеспечении устарела, нажмите кнопкуReload.
1.2. Обновление до новой версии
Теперь ваш компьютер знает, где взять новую версию программного обеспечения, теперь нам нужно ее установить.
Процесс снова различается в зависимости от вашей платформы.
1.2.1. Debian Bullseye, Bookworm and Trixie
Debian используют диспетчер пакетов Synaptic.
-
Откройте Synaptic, следуя инструкциям в разделе Настройка источников apt выше.
-
Нажмите кнопку
Reload. -
Используйте функцию поиска для поиска
linuxcnc. -
Пакет называется «linuxcnc» для ядер RTAI и «linuxcnc-uspace» для preempt-rt.
-
Установите флажок, чтобы отметить новые пакеты linuxcnc и linuxcnc-doc-* для обновления. Менеджер пакетов может выбрать несколько дополнительных пакетов для установки, чтобы удовлетворить зависимости, которые имеет новый пакет linuxcnc.
-
Нажмите кнопку
Apply, и ваш компьютер установит новый пакет. Старый пакет linuxcnc будет автоматически обновлен до нового.
1.3. Ubuntu
-
Нажмите на значок
Dash Homeв левом верхнем углу. -
В поле
Searchвведите «update», затем щелкните значокUpdate Manager. -
Нажмите кнопку
Check, чтобы просмотреть список доступных пакетов. -
Нажмите кнопку
Install Updates, чтобы установить новые версии всех пакетов.
2. Обновление без сети
Для обновления без подключения к сети вам необходимо загрузить .deb, а затем установить его с помощью dpkg. Файлы .debs можно найти по адресу https://linuxcnc.org/dists/.
Вам нужно перейти по ссылке выше, чтобы найти правильный deb для вашей установки. Откройте terminal и введите «lsb_release -ic», чтобы найти название выпуска вашей ОС.
> lsb_release -ic
Distributor ID: Debian
Codename: trixiePick the OS from the list then pick the major version you want like 2.9-rt for RTAI or 2.9-uspace for preempt-rt.
Next pick the type of computer you have: binary-amd64 for 64-bit PC or binary-arm64 (64bit) for Raspberry Pi.
Next pick the version you want from the bottom of the list like linuxcnc-uspace_2.9.8_amd64.deb (choose the latest by date). Download the deb and copy it to your home directory. You can rename the file to something a bit shorter with the file manager like linuxcnc_2.9.8.deb then open a terminal and install it with the package manager with this command:
sudo dpkg -i linuxcnc_2.9.8.deb3. Обновление файлов конфигурации для версии 2.9
3.1. Более строгое обращение с подключаемыми интерпретаторами
Если вы просто запускаете обычный G-код и не знаете, что такое подключаемый интерпретатор, то этот раздел вас не касается.
Редко используемая функция LinuxCNC — это поддержка подключаемых интерпретаторов, управляемая недокументированной настройкой INI [TASK]INTERPRETER.
Версии LinuxCNC до 2.9.0 использовались для обработки неправильной настройки [TASK]INTERPRETER путем автоматического возврата к использованию интерпретатора G-кода по умолчанию.
Начиная с версии 2.9.0, неправильное значение [TASK]INTERPRETER приведет к тому, что LinuxCNC откажется запускаться. Исправьте это условие, удалив настройку [TASK]INTERPRETER из вашего INI-файла, чтобы LinuxCNC использовал интерпретатор G-кода по умолчанию.
3.2. Canterp
Если вы просто запускаете обычный G-код и не используете подключаемый интерпретатор canterp, то этот раздел вас не касается.
В крайне маловероятном случае использования canterp знайте, что модуль перемещен из /usr/lib/libcanterp.so в /usr/lib/linuxcnc/canterp.so, и настройку [TASK]INTERPRETER соответственно, необходимо изменить с libcanterp.so на canterp.so.
3.3. Ограничения шпинделя в INI
Теперь можно добавлять настройки в раздел [SPINDLE] INI-файла
MAX_FORWARD_VELOCITY = 20000 The maximum spindle speed (in rpm)
MIN_FORWARD_VELOCITY = 3000 The minimum spindle speed (in rpm)
MAX_REVERSE_VELOCITY = 20000 Если этот параметр опущен, по умолчанию будет установлено значение MAX_FORWARD_VELOCITY.
MIN_REVERSE_VELOCITY = 3000` This setting is equivalent to MIN_FORWARD_VELOCITY but for reverse spindle rotation. It will default to the MIN_FORWARD_VELOCITY if omitted.
INCREMENT = 200 Sets the step size for spindle speed increment / decrement commands. This can have a different value for each spindle. This setting is effective with AXIS and Touchy but note that some control screens may handle things differently.
HOME_SEARCH_VELOCITY = 100 - Принято, но в настоящее время ничего не делает
HOME_SEQUENCE = 0 - Принято, но в настоящее время ничего не делает
4. Updating Configuration Files for 2.10.y
Touchy: the Touchy MACRO entries should now be placed in a [MACROS] section of the INI rather than in the [TOUCHY] section. This is part of a process of commonising the INI setting between GUIs.
5. New HAL components
5.1. Не в реальном времени
mdro mqtt-publisher pi500_vfd pmx485-test qtplasmac-cfg2prefs qtplasmac-materials qtplasmac-plasmac2qt qtplasmac-setup sim-torch svd-ps_vfd
5.2. В реальном времени
anglejog div2 enum filter_kalman flipflop homecomp limit_axis mesa_uart millturn scaled_s32_sums tof ton
6. Новые драйверы
Была представлена структура для управления устройствами ModBus с использованием последовательных портов на многих картах Mesa. http://linuxcnc.org/docs/2.9/html/drivers/mesa_modbus.html
Теперь включен новый драйвер GPIO для любого GPIO, поддерживаемого библиотекой gpiod: http://linuxcnc.org/docs/2.9/html/drivers/hal_gpio.html