Tous ces exemples s’appuient sur une configuration créée par Stepconf, elle a deux threads, base-thread et servo-thread.
L’assistant de configuration Stepconf aura créé le fichier vide custom.hal et le fichier custom_postgui.hal.
Le fichier custom.hal sera chargé après le fichier de configuration de HAL, le fichier custom_postgui.hal sera chargé après que l’interface graphique ne le soit.
1. Changement d’outil manuel
Dans cet exemple, il est supposé que la configuration a été réalisée et qu’il faut lui ajouter la fenêtre de changement d’outil de HAL. Le composant de changement d’outil manuel de HAL est surtout intéressant si les outils sont mesurables avec précision en longueur et que les offsets sont stockés dans la table d’outils. Si il est nécessaire de faire un Toucher pour chaque outil, il sera préférable de scinder le programme G-code en plusieurs tronçons. Pour utiliser la fenêtre de changement manuel d’outil de HAL, il faut d’abord charger le composant hal_manualtoolchange puis envoyer l’ordre iocontrol tool change vers le change de hal_manualtoolchange ainsi qu’envoyer le changed de hal_manualtoolchange en retour sur le iocontrol tool changed.
Voici un exemple avec utilisation du composant de HAL, pour clarifier tout cela:
loadusr -W hal_manualtoolchange net tool-change iocontrol.0.tool-change => hal_manualtoolchange.change net tool-changed iocontrol.0.tool-changed <= hal_manualtoolchange.changed net tool-number iocontrol.0.tool-prep-number => hal_manualtoolchange.number net tool-prepare-loopback iocontrol.0.tool-prepare => iocontrol.0.tool-prepared
Et voici un exemple sans le composant de changement manuel:
net tool-number <= iocontrol.0.tool-prep-number net tool-change-loopback iocontrol.0.tool.-change => iocontrol.0.tool-changed net tool-prepare-loopback iocontrol.0.tool-prepare => iocontrol.0.tool-prepared
2. Calcul de vitesse
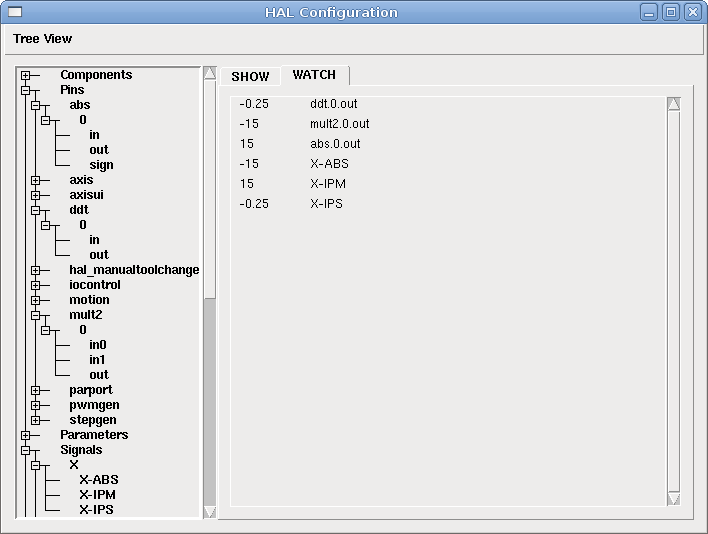
Cet exemple utilise ddt, mult2 et abs pour calculer la vitesse de déplacement sur un axe. Pour plus de détails, voir la section sur les composants de HAL.
En premier il convient de vérifier si la configuration contient déjà des composants temps réel. Il est possible de le vérifier en ouvrant la fenêtre de Halshow et en cherchant les composants dans la section des pins. Si il y en a déjà en activité, il faudra augmenter leur nombre et ajuster l’instance de ces composants à la valeur correcte. Ajouter le code suivant dans le fichier custom.hal.
Charger les composants temps réel.
loadrt ddt count=1 loadrt mult2 count=1 loadrt abs count=1
Ajouter les fonctions au thread pour qu’elles soient rafraîchies.
addf ddt.0 servo-thread addf mult2.0 servo-thread addf abs.0 servo-thread
Faire les connections.
setp mult2.in1 60 net xpos-cmd ddt.0.in net X-IPS mult2.0.in0 <= ddt.0.out net X-ABS abs.0.in <= mult2.0.out net X-IPM abs.0.out
Dans la dernière section, nous avons fixé le mult2.0.in1 à 60 pour convertir les unités par seconde en unités par minute (dans cet exemple, des pouces/mn), nous l’obtenons sur la sortie ddt.0.out.
La commande xpos-cmd envoie la position commandée à l’entrée ddt.0.in. Le ddt calcule la dérivée de la variation du signal sur son entrée.
La sortie ddt2.0.out est multipliée par 60 pour obtenir des unités par minute.
La sortie mult2.0.out est envoyée au composant abs pour obtenir la valeur absolue.
La figure suivante montre le résultat quand l’axe X se déplace à 15 unités/mn dans la direction négative. Noter que la valeur absolue peut être prise sur la pin abs.0.out ou le signal X-IPM.
3. Amortissement d’un signal
Cette exemple montre comment les composants de HAL lowpass, limit2 ou limit3 peuvent être utilisés pour amortir de brusques changements d’un signal.
Nous sommes sur un tour dont la broche est pilotée par un servomoteur. Si nous envoyions directement la consigne de vitesse de broche sur le servo, celui-ci chercherait, à partir de la vitesse courante, à atteindre la vitesse commandée le plus vite possible. Cette situation est problématique et peut détériorer le matériel. Pour amortir ce changement de vitesse, nous pouvons faire passer la sortie motion.spindle-speed-out à travers un limiteur avant d’aller au PID, de sorte que la valeur de commande du PID soit amortie.
Les trois composants intégrés pour amortir le signal seront:
- limit2
-
-
Limite le signal de sortie pour qu’il soit entre min et max.
-
Limite sa vitesse de montée à moins de MaxV par seconde. (dérivée première)
-
- limit3
-
-
Limite le signal de sortie pour qu’il soit entre min et max.
-
Limite sa vitesse de montée à moins de MaxV par seconde. (dérivée première)
-
Limite sa vitesse de montée à moins de MaxV par seconde2. (dérivée seconde)
-
- lowpass
-
-
Filtre passe-bas.
-
Pour plus de détails voir les composants de HAL ou les man pages des composants concernés.
Placer le code suivant dans un fichier appelé softstart.hal.
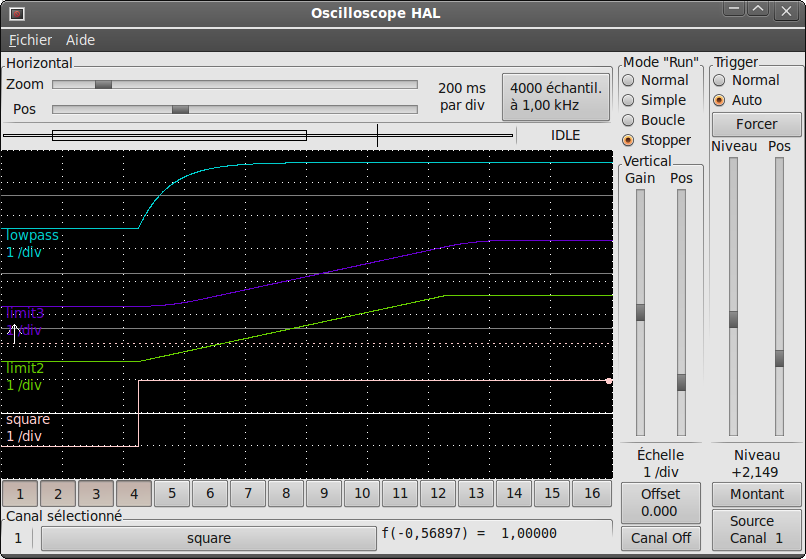
loadrt threads period1=1000000 name1=thread loadrt siggen loadrt lowpass loadrt limit2 loadrt limit3 net square siggen.0.square => lowpass.0.in limit2.0.in limit3.0.in net lowpass <= lowpass.0.out net limit2 <= limit2.0.out net limit3 <= limit3.0.out setp siggen.0.frequency .1 setp lowpass.0.gain .01 setp limit2.0.maxv 2 setp limit3.0.maxv 2 setp limit3.0.maxa 10 addf siggen.0.update thread addf lowpass.0 thread addf limit2.0 thread addf limit3.0 thread start loadusr halscope
Ouvrir un terminal et et lancer le fichier avec la commande suivante:
halrun -I softstart.hal
Pour démarrer l’oscilloscope de HAL pour la première fois, cliquer OK pour accepter le thread par défaut.
Ensuite, il faut ajouter les signaux à suivre aux canaux du scope. Cliquer sur le canal 1 puis sélectionner square depuis l’onglet Signaux. Répéter pour les canaux suivants en ajoutant lowpass, limit2 et limit3.
Ensuite, pour régler le signal du déclencheur cliquer sur le bouton Source est sélectionner square. Le bouton devrait changer pour Source Canal 1.
Puis, cliquer sur Simple dans le groupe Mode Run. L’oscillo devrait faire un balayage puis, afficher les traces.
Pour séparer les signaux et mieux les visualiser, cliquer sur un canal et utiliser le curseur de position verticale pour positionner les traces.
Pour voir l’effet d’un changement du point de réglage des valeurs des composants, il est possible de passer des commandes depuis le terminal. Par exemple,pour voir différentes valeurs de gain pour le passe-bas, taper la commande suivante, puis essayer différentes valeurs:
setp lowpass.0.gain .01
Après un changement de réglage, relancer Halscope pour visualiser l’effet.
Pour terminer, taper exit dans le terminal pour fermer halrun et halscope. Ne pas refermer le terminal avec halrun en marche, la mémoire ne serait pas vidée proprement, ce qui pourrait empêcher LinuxCNC de se charger.
Pour tout savoir sur Halscope et Halrun voir le tutoriel de HAL.
4. HAL en autonome
Dans certains cas il peut être utile de lancer un écran GladeVCP avec juste HAL. Par exemple, nous avons un moteur pas à pas a piloter et tout ce qu’il nous faut pour notre application est une simple interface avec Marche/Arrêt plutôt que charger une application de CNC complète.
Dans l’exemple qui suit, nous allons créer ce simple panneau GladeVCP.
# charge l'interface graphique winder.glade et la nome winder loadusr -Wn winder gladevcp -c winder -u handler.py winder.glade # charge les composants temps réel loadrt threads name1=fast period1=50000 fp1=0 name2=slow period2=1000000 loadrt stepgen step_type=0 ctrl_type=v loadrt hal_parport cfg="0x378 out" # ajoute les fonctions aux threads addf stepgen.make-pulses fast addf stepgen.update-freq slow addf stepgen.capture-position slow addf parport.0.read fast addf parport.0.write fast # effectue les connections de hal net winder-step parport.0.pin-02-out <= stepgen.0.step net winder-dir parport.0.pin-03-out <= stepgen.0.dir net run-stepgen stepgen.0.enable <= winder.start_button # démarre les threads start # commenter la ligne suivante pendant les essais et utiliser le mode interactif pour voir les pins etc. # option halrun -I -f start.hal # attends que la GUI gladevcp nommée winder soit terminée waitusr winder # arrête tous les threads stop # décharge tous les composants de HAL avant de quitter unloadrt all