1. Introduction
Halrun peut être utilisé pour créer un système complet et fonctionnel. Il s’agit d’un outil de configuration et de mise au point très puissant, en ligne de commande ou en fichier texte. Les exemples suivants illustrent son installation et son fonctionnement.
2. Halcmd
Halcmd est un outil en ligne de commande pour manipuler HAL. Il existe une man page plus complète pour halcmd, elle sera installée en même temps qu' LinuxCNC depuis ses sources ou depuis un paquet. Si LinuxCNC a été compilé en run-in-place, la man page n’est pas installée, mais elle est accessible, dans le répertoire principal de LinuxCNC, taper:
$ man -M docs/man halcmd
2.1. Tab-complétion
Votre version de halcmd peut inclure la complétion avec la touche tab. Au lieu de compléter les noms de fichiers comme le fait un shell, il complète les commandes avec les identifiants HAL. Essayez de presser la touche tab après le début d’une commande HAL:
halcmd: loa<TAB> halcmd: load halcmd: loadrt halcmd: loadrt deb<TAB> halcmd: loadrt debounce
2.2. L’environnement RTAPI
RTAPI est le sigle de Real Time Application Programming Interface. De nombreux composants HAL travaillent en temps réel et tous les composants de HAL stockent leurs données dans la mémoire partagée, de sorte que les composants temps réel puissent y accéder. Normalement, Linux ne prend pas en charge les programmes temps réel ni le type de mémoire partagée dont HAL a besoin. Heureusement, il existe des systèmes d’exploitation temps réel RTOS qui fournissent les extensions nécessaires à Linux. Malheureusement, chaque RTOS fait les choses différemment des autres.
Pour remédier à ces différences, l'équipe de LinuxCNC a proposé RTAPI, qui fournit une manière cohérente aux programmes de parler au RTOS. Si vous êtes un programmeur qui veut travailler à l’intérieur de LinuxCNC, vous pouvez étudier linuxcnc/src/rtapi/rtapi.h pour comprendre l’API. Mais si vous êtes une personne normale, tout ce que vous avez besoin de savoir à propos de RTAPI est qu’il doit être (avec le RTOS) chargé dans la mémoire de votre ordinateur avant de pouvoir faire n’importe quoi avec HAL.
3. Tutoriel simple
3.1. Charger un composant temps réel
Pour ce tutoriel, nous allons supposer que vous avez installé avec succès le CD-Live ou que vous avez compilé correctement l’arborescence linuxcnc/src. Si nécessaire, invoquez le script rip-environment pour préparer votre shell. Dans ce cas, tout ce que vous avez à faire est de charger le RTOS requis et les modules RTAPI dans la mémoire. Tapez juste les commandes suivantes dans une console:
$cd linuxcnc $linuxcnc halrun $halcmd:
Avec l’OS temps réel et RTAPI chargés, vous pouvez passer au premier exemple. Notez que le prompt a changé, il est passé de +$+ à halcmd:. La raison en est que les commandes ultérieures seront interprétées comme des commandes HAL et non plus comme des commandes shell.
Pour le premier exemple, nous allons utiliser un composant HAL appelé siggen, qui est un simple générateur de signaux. Une description complète de ce composant est disponible à la section siggen de ce document. Il s’agit d’un composant temps réel, mis en œuvre comme un module du noyau Linux. Pour charger siggen utiliser la commande de HAL, loadrt:
halcmd: loadrt siggen
3.2. Examiner HAL
Maintenant que le module est chargé, il faut introduire halcmd, l’outil en ligne de commande utilisé pour configurer HAL. Pour une description plus complète essayez: man halcmd, ou consultez la section halcmd au début de ce document. La première commande de halcmd et show, qui affichera les informations concernant l'état actuel de HAL. Pour afficher tout ce qui est installé tapez:
halcmd: show comp
Loaded HAL Components:
ID Type Name PID State
3 RT siggen ready
2 User halcmd2177 2177 ready
Puisque halcmd lui même est un composant HAL, il sera toujours présent dans la liste. Le nombre après halcmd dans la liste des composants est le Process ID. Il est toujours possible de lancer plus d’une instance de halcmd en même temps (dans différentes fenêtres par exemple), le numéro PID est ajouté à la fin du nom pour rendre celui-ci unique. La liste montre aussi le composant siggen que nous avions installé à l'étape précédente. Le RT sous Type indique que siggen est un composant temps réel.
Ensuite, voyons quelles pins siggen rend disponibles:
halcmd: show pin
Component Pins:
Owner Type Dir Value Name
3 float IN 1 siggen.0.amplitude
3 float OUT 0 siggen.0.cosine
3 float IN 1 siggen.0.frequency
3 float IN 0 siggen.0.offset
3 float OUT 0 siggen.0.sawtooth
3 float OUT 0 siggen.0.sine
3 float OUT 0 siggen.0.square
3 float OUT 0 siggen.0.triangle
Cette commande affiche toutes les pins présentes dans HAL. Un système complexe peut avoir plusieurs dizaines ou centaines de pins. Mais pour le moment il y a seulement huit pins. Toutes ces huit pins sont des flottants, elles transportent toutes des données en provenance du composant siggen. Puisque nous n’avons pas encore exécuté le code contenu dans le composant, certaines pins ont une valeur de zéro.
L'étape suivante consiste à examiner les paramètres:
halcmd: show param
Parameters:
Owner Type Dir Value Name
3 s32 RO 0 siggen.0.update.time
3 s32 RW 0 siggen.0.update.tmax
La commande show param affiche tous les paramètres de HAL. Pour le moment chaque paramètre à la valeur par défaut attribuée quand le composant a été chargé. Notez dans la colonne Dir, les paramètres marqués -W sont en écriture possible, pour ceux qui ne sont jamais modifiés par le composant lui-même, mais qui sont modifiables par l’utilisateur pour contrôler le composant. Nous verrons comment plus tard. Les paramètres marqués R- sont en lecture seule. Il ne peuvent être modifiés que par le composant. Finalement, les paramètres marqués RW sont en lecture/écriture. Ils peuvent être modifiés par le composant et aussi par l’utilisateur. Nota: les paramètres siggen.0.update.time et siggen.0.update.tmax existent dans un but de débogage, ils ne sont pas couverts par cette documentation. Les paramètres thread.time et thread.tmax sont associés avec le thread créé quand le composant a été chargé. Quand la réécriture de HAL sera terminée, le thread ne sera plus créé à ce stade, de sorte que ces paramètres ne seront plus visibles.
Il n’y a pas de thread créé ici, mais il y a quand même les paramètres siggen.0.update.time et siggen.0.update.tmax.
Les paramètres de thread sont ceux du composant 02, le module siggen. C’est incorrect, ils devraient être ceux du module hal_lib, parce que le thread lui même n’est plus la propriété de siggen, et si siggen est retiré, les paramètres devraient rester.
Et bien finalement, fixer les paramètres de thread aura pris plus de temps que je ne pensais. Donc, je les ai éliminés pour l’instant. Quand la réécriture de HAL sera terminée, je les remettrai.
La plupart des composants temps réel exportent une ou plusieurs fonctions pour que le code qu’elles contiennent soit exécuté en temps réel. Voyons ce que la fonction siggen exporte:
halcmd: show funct
Exported Functions:
Owner CodeAddr Arg FP Users Name
00003 f801b000 fae820b8 YES 0 siggen.0.update
Le composant siggen exporte une seule fonction. Il nécessite un
flottant (Floating Point). Il n’est lié à aucun thread, puisque users
est à zéro.
[Les champs CodeAddr et Arg ont été utilisés
pendant le développement et devraient probablement disparaître.]
3.3. Exécuter le code temps réel
Pour faire tourner le code actuellement contenu dans la fonction siggen.0.update, nous avons besoin d’un thread temps réel. C’est le composant appelé threads qui est utilisé pour créer le nouveau thread. Créons un thread appelé test-thread avec une période de 1 ms (1000 µs ou 1000000 ns):
halcmd: loadrt threads name1=test-thread period1=1000000
Voyons si il fonctionne:
halcmd: show thread
Realtime Threads:
Period FP Name ( Time, Max-Time )
999855 YES test-thread ( 0, 0 )
Il fonctionne. La période n’est pas exactement de 1000000 ns à cause des limitations dues au matériel, mais nous avons bien un thread qui tourne à une période approximativement correcte et qui peut manipuler des fonctions en virgule flottante. La prochaine étape sera de connecter la fonction au thread:
halcmd: addf siggen.0.update test-thread
Pour le moment nous avions utilisé halcmd seulement pour regarder HAL. Mais cette fois-ci, nous avons utilisé la commande addf (add function) pour changer quelque chose dans HAL. Nous avons dit à halcmd d’ajouter la fonction siggen.0.update au thread test-thread et la commande suivante indique qu’il a réussi:
halcmd: show thread
Realtime Threads:
Period FP Name ( Time, Max-Time )
999855 YES test-thread ( 0, 0 )
1 siggen.0.update
Il y a une étape de plus avant que le composant siggen ne commence à générer des signaux. Quand HAL est démarré pour la première fois, les threads ne sont pas en marche. C’est pour vous permettre de compléter la configuration du système avant que le code temps réel ne démarre. Une fois que vous êtes satisfait de la configuration, vous pouvez lancer le code temps réel comme ceci:
halcmd: start
Maintenant le générateur de signal est en marche. Regardons ses pins de sortie:
halcmd: show pin
Component Pins:
Owner Type Dir Value Name
3 float IN 1 siggen.0.amplitude
3 float OUT -0.1640929 siggen.0.cosine
3 float IN 1 siggen.0.frequency
3 float IN 0 siggen.0.offset
3 float OUT -0.4475303 siggen.0.sawtooth
3 float OUT 0.9864449 siggen.0.sine
3 float OUT -1 siggen.0.square
3 float OUT -0.1049393 siggen.0.triangle
Regardons encore une fois:
halcmd: show pin
Component Pins:
Owner Type Dir Value Name
3 float IN 1 siggen.0.amplitude
3 float OUT 0.0507619 siggen.0.cosine
3 float IN 1 siggen.0.frequency
3 float IN 0 siggen.0.offset
3 float OUT -0.516165 siggen.0.sawtooth
3 float OUT 0.9987108 siggen.0.sine
3 float OUT -1 siggen.0.square
3 float OUT 0.03232994 siggen.0.triangle
Nous avons fait, très rapidement, deux commandes show pin et vous pouvez voir que les sorties ne sont plus à zéro. Les sorties sinus, cosinus, dents de scie et triangle changent constamment. La sortie carrée fonctionne également, mais elle passe simplement de +1.0 à -1.0 à chaque cycle.
3.4. Modifier des paramètres
La réelle puissance de HAL est de permettre de modifier les choses. Par exemple, on peut utiliser la commande setp pour ajuster la valeur d’un paramètre. Modifions l’amplitude du signal de sortie du générateur de 1.0 à 5.0:
halcmd: setp siggen.0.amplitude 5
Voyons encore une fois les paramètres et les pins:
halcmd: show param
Parameters:
Owner Type Dir Value Name
3 s32 RO 1754 siggen.0.update.time
3 s32 RW 16997 siggen.0.update.tmax
halcmd: show pin
Component Pins:
Owner Type Dir Value Name
3 float IN 5 siggen.0.amplitude
3 float OUT 0.8515425 siggen.0.cosine
3 float IN 1 siggen.0.frequency
3 float IN 0 siggen.0.offset
3 float OUT 2.772382 siggen.0.sawtooth
3 float OUT -4.926954 siggen.0.sine
3 float OUT 5 siggen.0.square
3 float OUT 0.544764 siggen.0.triangle
Notez que la valeur du paramètre siggen.0.amplitude est bien passée à 5.000 et que les pins ont maintenant des valeurs plus grandes.
3.5. Enregistrer la configuration de HAL
La plupart de ce que nous avons fait jusqu’ici avec halcmd a été de simplement regarder les choses avec la commande show . Toutefois, deux commandes ont réellement modifié des valeurs. Au fur et à mesure que nous concevons des systèmes plus complexes avec HAL, nous allons utiliser de nombreuses commandes pour le configurer comme nous le souhaitons. HAL a une mémoire d'éléphant et peut retenir sa configuration jusqu'à ce qu’il s’arrête. Mais qu’en est-il de la prochaine fois ? Nous ne voulons pas entrer une série de commande à chaque fois que l’on veut utiliser le système. Nous pouvons enregistrer la configuration de l’ensemble de HAL en une seule commande:
halcmd: save
# components
loadrt threads name1=test-thread period1=1000000
loadrt siggen
# pin aliases
# signals
# nets
# parameter values
setp siggen.0.update.tmax 14687
# realtime thread/function links
addf siggen.0.update test-thread
La sortie de la commande save est une séquence de commandes HAL. Si vous commencez par un HAL vide et que vous tapez toute la séquence de commandes HAL, vous aurez la configuration qui existait lors de l’exécution de la commande save. Pour sauver ces commandes pour une utilisation ultérieure, nous allons simplement rediriger la sortie vers un fichier:
halcmd: save all saved.hal
3.6. Quitter halrun
Pour quitter halrun, ne pas fermez simplement la fenêtre de terminal sans avoir arrêté la session de HAL, pour l’arrêter correctement tapez:
halcmd: exit ~/linuxcnc$
3.7. Restaurer la configuration de HAL
Pour restaurer la configuration de HAL enregistrée dans saved.hal, nous avons besoin d’exécuter toutes les commandes enregistrées. Pour ce faire, nous utiliserons la commande -f <filename> qui lit les commandes à partir d’un fichier, le -I affichera le prompt halcmd après l’exécution des commandes:
~/linuxcnc$ halrun -I -f saved.hal
Noter qu’il n’y a pas de commande start dans le fichier saved.hal. Il est nécessaire de la retaper (ou d'éditer saved.hal pour l’ajouter):
halcmd: start halcmd: exit ~/linuxcnc$
3.8. Suppression de la mémoire de HAL
Si un arrêt inattendu d’une session de HAL survient, il sera peut être nécessaire de décharger HAL de la mémoire avant de pouvoir lancer une autre session. Pour cela, taper la commande suivante dans une fenêtre de terminal:
~/linuxcnc$ halrun -U
4. Visualiser HAL avec halmeter
Il est possible de construire des systèmes HAL vraiment complexes sans utiliser d’interface graphique. Mais il y a quelque chose de rassurant à visualiser le résultat du travail. Le premier et le plus simple des outils graphiques pour HAL, est halmeter. C’est un programme très simple qui s’utilise comme un multimètre. Il permet d’observer les pins, signaux ou paramètres en affichant la valeur courante de ces items. Il est très simple à utiliser. Dans une console taper halmeter. halmeter est une application pour environnement graphique. Deux fenêtres vont apparaître, la fenêtre de sélection est la plus grande. Elle comprend trois onglets. Un onglet liste toutes les pins actuellement définies dans HAL. Le suivant, liste tous les signaux et le dernier onglet, liste tous les paramètres. Cliquer sur un onglet, puis cliquer sur un des items pour le sélectionner. La petite fenêtre affichera le nom et la valeur de l’item sélectionné. L’affichage est mis à jour environ 10 fois par seconde. Pour libérer de la place sur l'écran, la fenêtre de sélection peut être fermée avec le bouton Fermer. Sur la petite fenêtre, cachée sous la grande à l’ouverture, le bouton Sélectionner, ré-ouvre la fenêtre de sélection et le bouton Quitter arrête le programme et ferme les fenêtres.
Il est possible d’ouvrir et de faire fonctionner simultanément plusieurs halmeter, ce qui permet de visualiser plusieurs items en même temps. Pour ouvrir un halmeter en libérant la console, taper halmeter & pour le lancer en tâche de fond. Il est possible de lancer halmeter en lui faisant afficher immédiatement un item, pour cela, ajouter les arguments sur la ligne de commande pin|sig|par[am] nom. Il affichera le signal, la pin, ou le paramètre nom dès qu’il démarrera. Si l’item indiqué n’existe pas, il démarrera normalement. Finalement, si un item est spécifié pour l’affichage, il est possible d’ajouter -s devant pin|sig|param pour indiquer à halmeter d’utiliser une fenêtre encore plus réduite. Le nom de l’item sera affiché dans la barre de titre au lieu de sous la valeur et il n’y aura pas de bouton. Utile pour afficher beaucoup de halmeter dans un petit espace de l'écran.
Nous allons utiliser de nouveaux éléments du composant siggen pour vérifier halmeter. Si vous avez fini l’exemple précédent, alors siggen est déjà chargé. Sinon, on peut charger tout comme nous l’avons fait précédemment:
~/linuxcnc$ halrun halcmd: loadrt siggen halcmd: loadrt threads name1=test-thread period1=1000000 halcmd: addf siggen.0.update test-thread halcmd: start halcmd: setp siggen.0.amplitude 5
4.1. Lancement de halmeter
À ce stade, nous avons chargé le composant siggen, il est en cours d’exécution. Nous pouvons lancer halmeter. Puisque halmeter est une application graphique, X doit être actif.
halcmd: loadusr halmeter
Dans le même temps, une fenêtre s’ouvre sur votre écran, demandant de sélectionner l’item à observer.
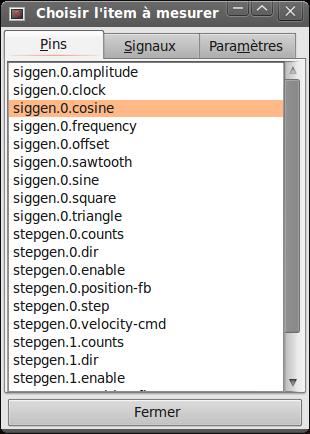
Ce dialogue contient trois onglets. Le premier onglet affiche toutes les HAL pins du système. La seconde affiche tous les signaux et le troisième affiche tous les paramètres. Si nous voulons analyser la pin siggen.0.cosine en premier, il suffit de cliquer sur elle puis sur le bouton Fermer. Le dialogue de sélection se ferme et la mesure s’affiche dans une fenêtre semblable à la figure ci-dessous.
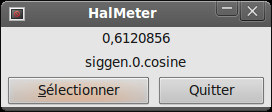
Pour modifier ce qui est affiché sur halmeter pressez le bouton Sélectionner qui vous ramènera à la fenêtre de sélection précédente.
Vous devriez voir la valeur évoluer puisque siggen génère une onde cosinusoïdale. halmeter rafraîchi son affichage environ 5 fois par seconde.
Pour éteindre halmeter, cliquer sur le bouton Quitter.
5. Tutoriel plus complexe avec stepgen
Jusqu'à maintenant, nous avons chargé un composant HAL. Mais l’idée générale de HAL est de vous permettre de charger et de relier un grand nombre de composants pour en faire un système complexe. L’exemple suivant va utiliser deux composants.
Avant de mettre en place ce nouvel exemple, nous allons commencer par un petit nettoyage. Si vous avez fini l’un des exemples précédents, il faut supprimer tous les composants et ensuite recharger la RTAPI et les librairies de HAL en faisant:
halcmd: exit ~/linuxcnc$ halrun
5.1. Installation des composants
Maintenant, nous allons charger le composant générateur d’impulsions.
Pour l’instant, nous pouvons nous passer des détails et exécuter les
commandes suivantes:
[Le signe \ à la fin d’une longue ligne
indique que la ligne est tronquée (c’est nécessaire pour formater ce document).
Quand vous entrez la commande en ligne dans la console, sautez simplement le \
(ne pressez pas Entrée) et continuez à taper la ligne suivante.]
Dans cet exemple nous utiliserons le type de contrôle velocity du composant stepgen.
halrun: loadrt stepgen step_type=0,0 ctrl_type=v,v halcmd: loadrt siggen halcmd: loadrt threads name1=fast fp1=0 period1=50000 name2=slow period2=1000000
La première commande charge deux générateurs d’impulsions, configurés pour générer des impulsions de type 0. La seconde commande charge notre vieil ami siggen et la troisième crée deux threads, un rapide (fast) avec une période de 50 µs et un lent avec une période de 1ms. Le thread rapide ne prend pas en charge les fonctions à virgule flottante (fp1=0).
Comme précédemment, on peut utiliser halcmd show pour jeter un coup d’oeil à HAL. Cette fois, nous aurons beaucoup plus de pins et de paramètres que précédemment:
halcmd: show pin
Component Pins:
Owner Type Dir Value Name
4 float IN 1 siggen.0.amplitude
4 float OUT 0 siggen.0.cosine
4 float IN 1 siggen.0.frequency
4 float IN 0 siggen.0.offset
4 float OUT 0 siggen.0.sawtooth
4 float OUT 0 siggen.0.sine
4 float OUT 0 siggen.0.square
4 float OUT 0 siggen.0.triangle
3 s32 OUT 0 stepgen.0.counts
3 bit OUT FALSE stepgen.0.dir
3 bit IN FALSE stepgen.0.enable
3 float OUT 0 stepgen.0.position-fb
3 bit OUT FALSE stepgen.0.step
3 float IN 0 stepgen.0.velocity-cmd
3 s32 OUT 0 stepgen.1.counts
3 bit OUT FALSE stepgen.1.dir
3 bit IN FALSE stepgen.1.enable
3 float OUT 0 stepgen.1.position-fb
3 bit OUT FALSE stepgen.1.step
3 float IN 0 stepgen.1.velocity-cmd
halcmd: show param
Parameters:
Owner Type Dir Value Name
4 s32 RO 0 siggen.0.update.time
4 s32 RW 0 siggen.0.update.tmax
3 u32 RW 0x00000001 stepgen.0.dirhold
3 u32 RW 0x00000001 stepgen.0.dirsetup
3 float RO 0 stepgen.0.frequency
3 float RW 0 stepgen.0.maxaccel
3 float RW 0 stepgen.0.maxvel
3 float RW 1 stepgen.0.position-scale
3 s32 RO 0 stepgen.0.rawcounts
3 u32 RW 0x00000001 stepgen.0.steplen
3 u32 RW 0x00000001 stepgen.0.stepspace
3 u32 RW 0x00000001 stepgen.1.dirhold
3 u32 RW 0x00000001 stepgen.1.dirsetup
3 float RO 0 stepgen.1.frequency
3 float RW 0 stepgen.1.maxaccel
3 float RW 0 stepgen.1.maxvel
3 float RW 1 stepgen.1.position-scale
3 s32 RO 0 stepgen.1.rawcounts
3 u32 RW 0x00000001 stepgen.1.steplen
3 u32 RW 0x00000001 stepgen.1.stepspace
3 s32 RO 0 stepgen.capture-position.time
3 s32 RW 0 stepgen.capture-position.tmax
3 s32 RO 0 stepgen.make-pulses.time
3 s32 RW 0 stepgen.make-pulses.tmax
3 s32 RO 0 stepgen.update-freq.time
3 s32 RW 0 stepgen.update-freq.tmax
5.2. Connexion des pins avec les signaux
Nous avons donc deux générateurs d’impulsions de pas et un générateur de signaux. Maintenant, nous allons créer des signaux HAL pour connecter ces trois composants. Nous allons faire comme si nous pilotions les axes X et Y d’une machine avec nos générateurs d’impulsions de pas. Nous voulons déplacer la table en ronds. Pour ce faire, nous allons envoyer un signal cosinusoïdal à l’axe des X et un signal sinusoïdal à l’axe des Y. Le module siggen créera le sinus et le cosinus, mais nous aurons besoin de fils pour connecter les modules ensemble. Dans HAL, les fils sont appelés signaux. Nous devons en créer deux. Nous pouvons les appeler comme on veut, dans cet exemple il y aura X-vel et Y-vel. Le signal X-vel partira de la sortie cosinus du générateur de signaux et arrivera sur l’entrée velocity du premier générateur d’impulsions de pas. La première étape consiste à connecter le signal à la sortie du générateur de signaux. Pour connecter un signal à une pin, nous utilisons la commande net:
halcmd: net X-vel <= siggen.0.cosine
Pour voir l’effet de la commande net, regardons les signaux:
halcmd: show sig
Signals:
Type Value Name (linked to)
float 0 X-vel <== siggen.0.cosine
Quand un signal est connecté à une ou plusieurs pins, la commande show liste les pins immédiatement suivies par le nom du signal. Les flèches donnent la direction du flux de données, dans ce cas, le flux va de la pin siggen.0.cosine vers le signal X-vel. Maintenant, connectons X-vel à l’entrée velocity du générateur d’impulsions de pas:
halcmd: net X-vel => stepgen.0.velocity-cmd
Nous pouvons aussi connecter l’axe Y au signal Y-vel. Il doit partir de la sortie sinus du générateur de signaux pour arriver sur l’entrée du second générateur d’impulsions de pas. La commande suivante fait, en une ligne, la même chose que les deux commandes net précédentes ont fait pour X-vel:
halcmd: net Y-vel siggen.0.sine => stepgen.1.velocity-cmd
Pour voir l’effet de la commande net, regardons encore les signaux et les pins:
halcmd: show sig
Signals:
Type Value Name (linked to)
float 0 X-vel <== siggen.0.cosine
==> stepgen.0.velocity-cmd
float 0 Y-vel <== siggen.0.sine
==> stepgen.1.velocity-cmd
La commande show sig montre clairement comment les flux de données circulent dans HAL. Par exemple, le signal X-vel provient de la pin siggen.0.cosine et va vers la pin stepgen.0.velocity-cmd.
5.3. Exécuter les réglages du temps réel - threads et functions
Penser à ce qui circule dans les fils rend les pins et les signaux assez faciles à comprendre. Les threads et les fonctions sont un peu plus délicates à appréhender. Les fonctions contiennent des instructions pour l’ordinateur. Les threads sont les méthodes utilisées pour faire exécuter ces instructions quand c’est nécessaire. Premièrement, regardons les fonctions dont nous disposons:
halcmd: show funct
Exported Functions:
Owner CodeAddr Arg FP Users Name
00004 f9992000 fc731278 YES 0 siggen.0.update
00003 f998b20f fc7310b8 YES 0 stepgen.capture-position
00003 f998b000 fc7310b8 NO 0 stepgen.make-pulses
00003 f998b307 fc7310b8 YES 0 stepgen.update-freq
En règle générale, vous devez vous référer à la documentation de chaque composant pour voir ce que font ses fonctions. Dans notre exemple, la fonction siggen.0.update est utilisée pour mettre à jour les sorties du générateur de signaux. Chaque fois qu’elle est exécutée, le générateur recalcule les valeurs de ses sorties sinus, cosinus, dent de scie, triangle, carrée. Pour générer un signal régulier, il doit fonctionner à des intervalles très précis.
Les trois autres fonctions sont relatives au générateur d’impulsions de pas:
La première, stepgen.capture-position, est utilisée pour un retour de position. Elle capture la valeur d’un compteur interne comptant les impulsions qui sont générées. S’il n’y a pas de perte de pas, ce compteur indique la position du moteur.
La fonction principale du générateur d’impulsions est stepgen.make-pulses. Chaque fois que make-pulses démarre, elle décide qu’il est temps de faire un pas, si oui elle fixe les sorties en conséquence. Pour des pas plus doux, elle doit fonctionner le plus souvent possible. Parce qu’elle a besoin de fonctionner de manière rapide, make-pulses est hautement optimisée et n’effectue que quelques calculs. Contrairement aux autres, elle n’a pas besoin de virgule flottante pour ses calculs.
La dernière fonction, stepgen.update-freq, est responsable de l'échelle et de quelques autres calculs qui ne doivent être effectués que lors d’une commande de changement de fréquence.
Pour notre exemple nous allons faire tourner siggen.0.update à une vitesse modérée pour le calcul des valeurs sinus et cosinus. Immédiatement après avoir lancé siggen.0.update, nous lançons stepgen.0.update_freq pour charger les nouvelles valeurs dans le générateur d’impulsions. Finalement nous lancerons stepgen.make_pulses aussi vite que possible pour des pas plus doux. Comme nous n’utilisons pas de retour de position, nous n’avons pas besoin de lancer stepgen.capture_position.
Nous lançons les fonctions en les ajoutant aux threads. Chaque thread va à une vitesse précise. Regardons de quels threads nous disposons:
halcmd: show thread
Realtime Threads:
Period FP Name ( Time, Max-Time )
996980 YES slow ( 0, 0 )
49849 NO fast ( 0, 0 )
Les deux threads ont été créés lorsque nous les avons chargés. Le premier, slow , tourne toutes les millisecondes, il est capable d’exécuter des fonctions en virgule flottante (FP). Nous l’utilisons pour siggen.0.update et stepgen.update_freq. Le deuxième thread est fast, il tourne toutes les 50 microsecondes, il ne prend pas en charge les calculs en virgule flottante. Nous l’utilisons pour stepgen.make_pulses. Pour connecter des fonctions au bon thread, nous utilisons la commande addf. Nous spécifions la fonction en premier, suivie par le thread:
halcmd: addf siggen.0.update slow halcmd: addf stepgen.update-freq slow halcmd: addf stepgen.make-pulses fast
Après avoir lancé ces commandes, nous pouvons exécuter la commande show thread une nouvelle fois pour voir ce qui ce passe:
halcmd: show thread
Realtime Threads:
Period FP Name ( Time, Max-Time )
996980 YES slow ( 0, 0 )
1 siggen.0.update
2 stepgen.update-freq
49849 NO fast ( 0, 0 )
1 stepgen.make-pulses
Maintenant, chaque thread est suivi par les noms des fonctions, dans l’ordre dans lequel les fonctions seront exécutées.
5.4. Réglage des paramètres
Nous sommes presque prêts à démarrer notre système HAL. Mais il faut auparavant régler quelques paramètres. Par défaut le composant siggen génère des signaux qui varient entre +1 et -1. Pour notre exemple, c’est très bien, nous voulons que la vitesse de la table varie de +1 à -1 pouce par seconde. Toutefois, l'échelle du générateur d’impulsions de pas n’est pas bonne. Par défaut, il génère une fréquence de sortie de 1 pas par seconde avec une capacité de 1000. Il est fort improbable qu’un pas par seconde nous donne une vitesse de déplacement de la table d’un pouce par seconde. Supposons que notre vis fasse 5 tours par pouce, couplée à un moteur pas à pas de 200 pas par tour et une interface qui fournit 10 micropas par pas. Il faut donc 2000 pas pour faire un tour de vis et 5 tours pour faire un pouce. Ce qui signifie que notre montage utilisera 10000 pas par pouce. Nous avons besoin de multiplier la vitesse d’entrée à l'étape générateur d’impulsions par 10000 pour obtenir la bonne valeur. C’est exactement pour cela qu’existe le paramètre stepgen.n.velocity-scale . Dans notre cas, les axes X et Y ont la même échelle et nous pouvons passer les deux paramètres à 10000:
halcmd: setp stepgen.0.position-scale 10000 halcmd: setp stepgen.1.position-scale 10000 halcmd: setp stepgen.0.enable 1 halcmd: setp stepgen.1.enable 1
Cela signifie que, avec la pin stepgen.0.velocity-cmd à 1.000 et le générateur réglé pour 10000 impulsions par seconde (10kHz), avec le moteur et la vis décrits précédemment, nos axes auront une vitesse de déplacement de exactement 1.000 pouce par seconde. Cela illustre une notion clé du concept de HAL, des éléments comme les échelles étant au plus bas niveau possible, dans notre exemple le générateur d’impulsions de pas, le signal interne X-vel est celui de la vitesse de déplacement de la table en pouces par seconde. Les autres composants comme siggen ne savent rien du tout à propos de l'échelle des autres. Si on change de vis, ou de moteur, il n’y a qu’un seul paramètre à changer, l'échelle du générateur d’impulsions de pas.
5.5. Lançons le!
Nous avons maintenant tout configuré et sommes prêts à démarrer. Tout comme dans le premier exemple, nous utilisons la commande start:
halcmd: start
Bien que rien ne semble se produire, à l’intérieur de l’ordinateur les impulsions de pas sont présentes sur la sortie du générateur, variant entre 10kHz dans un sens et 10kHz dans l’autre à chaque seconde. Dans la suite de ce tutoriel, nous allons voir comment convertir ces signaux internes des moteurs dans le monde réel, mais nous allons d’abord les examiner pour voir ce qui se passe.
6. Voyons-y de plus près avec halscope
L’exemple précédent génère certains signaux très intéressants. Mais beaucoup de ce qui se passe est beaucoup trop rapide pour être vu avec halmeter. Pour examiner de plus près ce qui se passe à l’intérieur de HAL, il faudrait un oscilloscope. Heureusement HAL en offre un, appelé halscope. Il permet de capturer la valeur des pins, des signaux et des paramètres en fonction du temps.
6.1. Démarrer halscope
halscope comporte deux parties, une partie en temps réel qui est chargée comme un module de noyau et une partie utilisateur qui fournit l’interface graphique et l’affichage. Cependant, vous n’avez pas à vous inquiéter à ce sujet car l’interface demandera automatiquement que la partie temps réel soit chargée:
halcmd: loadusr halscope
La fenêtre graphique du scope s’ouvre, immédiatement suivie par un dialogue Fonction temps réel non liée visible sur la figure ci-dessous:
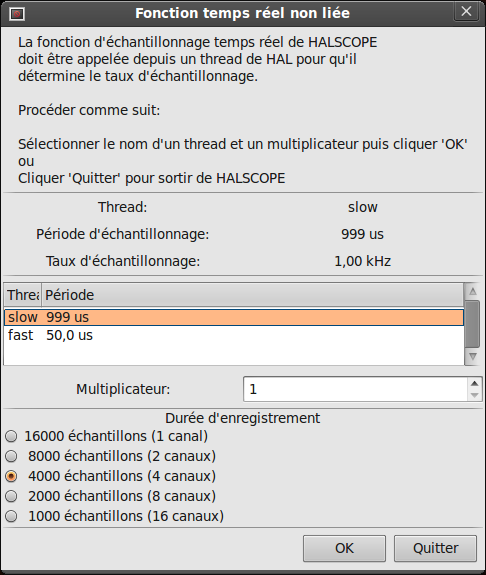
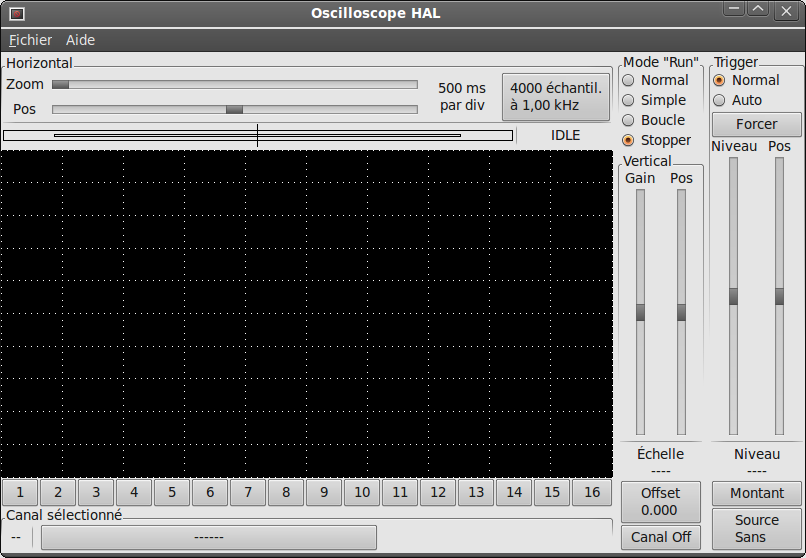
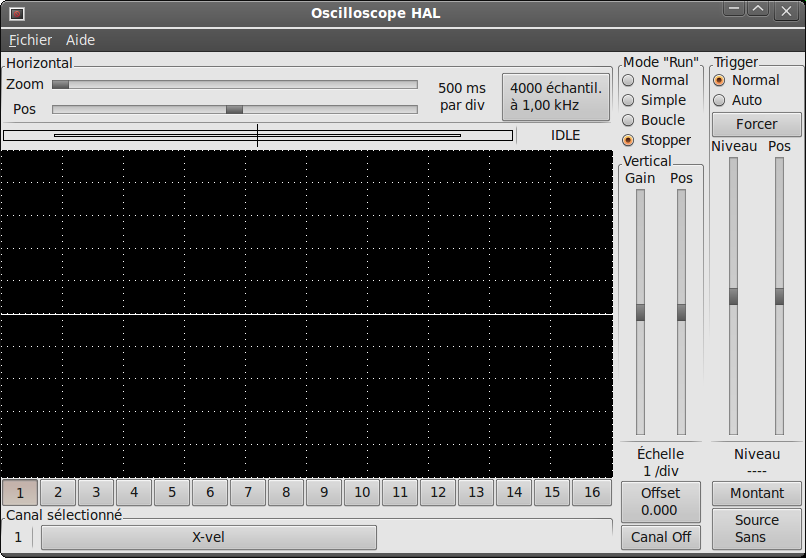
C’est dans ce dialogue que vous définissez le taux d'échantillonnage de l’oscilloscope. Pour le moment nous voulons un échantillon par milliseconde, alors cliquez sur le thread slow et laissez le multiplicateur à 1. Nous allons aussi passer la longueur d’enregistrement à 4000 échantillons, de sorte que nous puissions utiliser jusqu'à 4 canaux simultanément. Quand vous sélectionnez un thread puis que vous cliquez sur le bouton OK, le dialogue disparaît et la fenêtre initiale du scope s’ouvre, comme ci-dessous.
6.2. Branchement des sondes du scope
À ce stade, halscope est prêt à l’emploi. Nous avons déjà choisi le taux d'échantillonnage et la longueur d’enregistrement, de sorte que la prochaine étape consiste à décider de ce qu’il faut mesurer. C’est équivalent à brancher les sondes virtuelles du scope à HAL. halscope dispose de 16 canaux, mais le nombre de canaux utilisables à un moment donné dépend de la longueur d’enregistrement, plus il y a de canaux, plus les enregistrements seront courts, car la mémoire disponible pour l’enregistrement est fixée à environ 16000 échantillons.
Les boutons des canaux se situent en dessous de l'écran du scope. Cliquez le bouton 1 et vous verrez apparaître le dialogue de sélection des sources dans lequel vous devrez choisir _la source qui devra s’afficher sur le canal 1, comme sur la figure ci-dessous. Ce dialogue est très similaire à celui utilisé par halmeter.
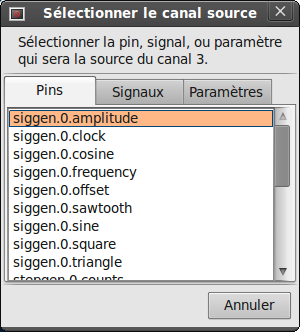
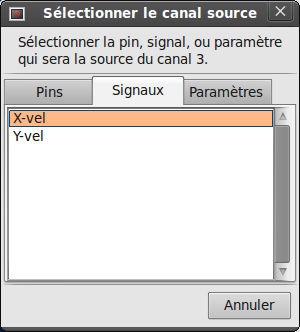
Nous aimerions bien regarder les signaux que nous avons défini précédemment, pour cela, cliquons sur l’onglet Signaux et le dialogue affichera tous les signaux existants dans HAL, dans notre exemple nous avons seulement les deux signaux X-vel et Y-vel, comme ci-dessous.
Pour choisir un signal, il suffit de cliquer dessus. Dans notre cas, nous voulons utiliser le canal 1 pour afficher le signal X-vel. Lorsque l’on clique sur X-vel, la fenêtre se ferme et le canal a été sélectionné.
Le bouton du canal 1 est pressé, le numéro du canal 1 et le nom X-vel apparaissent sous la rangée de boutons. L’affichage indique toujours le canal sélectionné, vous pouvez avoir beaucoup de canaux sur l'écran, mais celui qui est actif sera en surbrillance.
Les différents contrôles comme la position verticale et l’amplitude sont toujours relatifs au canal 1. Pour ajouter un signal sur le canal 2, cliquer sur le bouton 2. Dans la fenêtre de dialogue, cliquer sur l’onglet Signaux, puis cliquer sur Y-vel.
Nous voulons aussi voir les signaux carrés et triangles produits. Il n’existe pas de signaux connectés à ces pins, nous utilisons donc l’onglet Pins. Pour le canal 3, sélectionnez siggen.0.triangle et pour le canal 4, choisissez siggen.0.square.
6.3. Capturer notre première forme d’onde
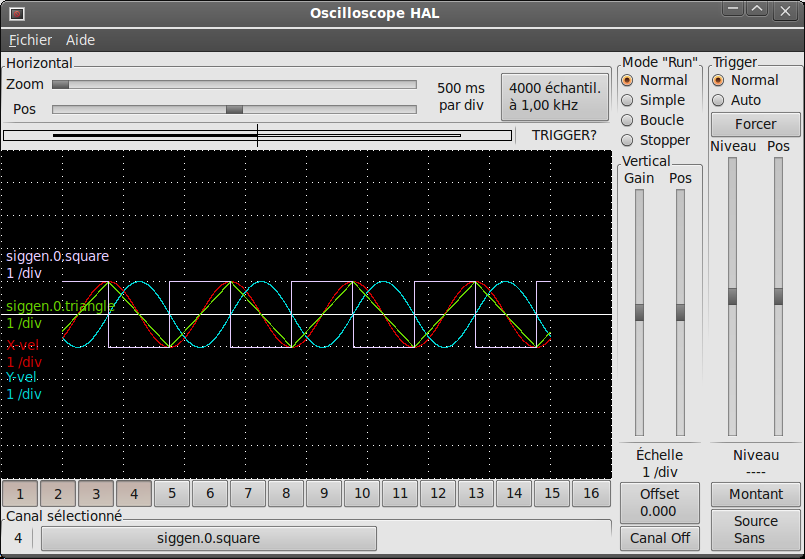
Maintenant que nous avons plusieurs sondes branchées sur HAL, nous pouvons capturer quelques formes d’ondes. Pour démarrer le scope, cochez la case Normal du groupe Mode "Run" (en haut à droite). Puisque nous avons une longueur d’enregistrement de 4000 échantillons et une acquisition de 1000 échantillons par seconde, il faudra à halscope environ 2 secondes pour remplir la moitié de son tampon. Pendant ce temps, une barre de progression juste au-dessus de l'écran principal affichera le remplissage du tampon. Une fois que le tampon est à moitié plein, scope attend un déclencheur (Trigger). Puisque nous n’en avons pas encore configuré, il attendra toujours. Pour déclencher manuellement, cliquez sur le bouton Forcer du groupe Trigger en haut à droite. Vous devriez voir le reste de la zone tampon se remplir, puis l'écran afficher les ondes capturées. Le résultat ressemble à la figure ci-dessous.
6.4. Ajustement vertical
Les traces sont assez difficiles à distinguer car toutes les quatre sont les unes sur les autres. Pour résoudre ce problème, nous utilisons les curseurs du groupe Vertical situé à droite de l'écran. Ces deux curseurs agissent sur le canal actuellement sélectionné. En ajustant le Gain, notez qu’il couvre une large échelle (contrairement aux oscilloscopes réels), celle-ci permet d’afficher des signaux très petits (pico unités) à très grands (Tera - unités). Le curseur Pos déplace la trace affichée de haut en bas sur toute la hauteur de l'écran. Pour de plus grands ajustements le bouton Offset peut être utilisé.
Le grand bouton Canal sélectionné en bas, indique que le canal 1 est actuellement le canal sélectionné et qu’il correspond au signal X-vel. Essayez de cliquer sur les autres canaux pour mettre leurs traces en évidence et pouvoir les déplacer avec le curseur Pos.
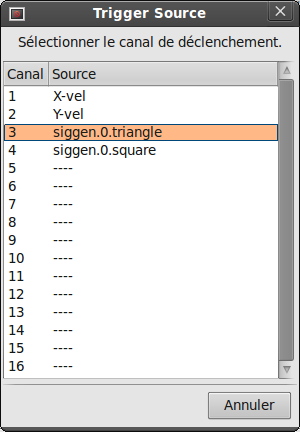
6.5. Déclenchement (Triggering)
L’utilisation du bouton Forcer n’est parfois pas satisfaisante pour déclencher le scope. Pour régler un déclenchement réel, cliquer sur le bouton Source situé en bas à droite. Il ouvre alors le dialogue Trigger Source, qui est simplement la liste de toutes les sondes actuellement branchées, voir la figure ci-dessous. Sélectionner la sonde à utiliser pour déclencher en cliquant dessus. Pour notre exemple nous utilisons 3 canaux, essayons l’onde triangle. Quand le dialogue ce referme, après le choix, le bouton affiche Source Canal n où n est le numéro du canal venant d'être choisi comme déclencheur.
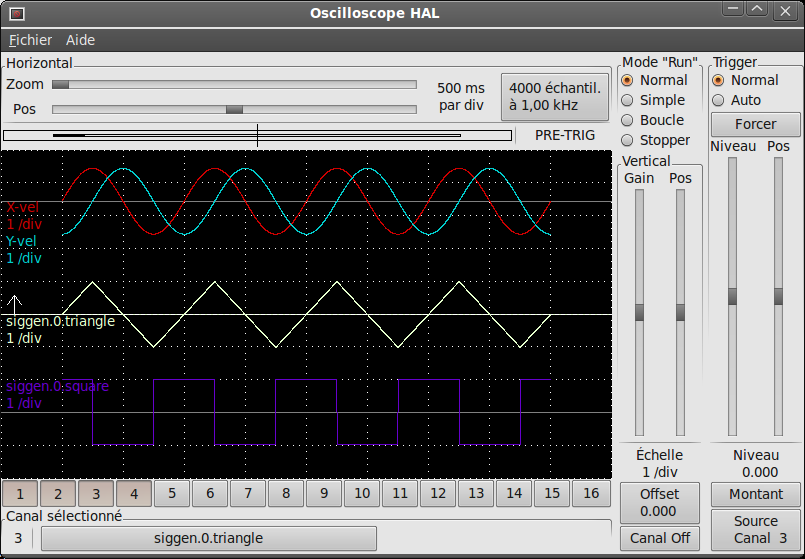
Après avoir défini la source de déclenchement, il est possible d’ajuster le niveau de déclenchement avec les curseurs du groupe Trigger le long du bord droit. Le niveau peut être modifié à partir du haut vers le bas de l'écran, il est affiché sous les curseurs. La position est l’emplacement du point de déclenchement dans l’enregistrement complet. Avec le curseur tout en bas, le point de déclenchement est à la fin de l’enregistrement et halscope affiche ce qui s’est passé avant le déclenchement. Lorsque le curseur est tout en haut, le point de déclenchement est au début de l’enregistrement, l’affichage représente ce qui s’est passé après le déclenchement. Le point de déclenchement est visible comme une petite ligne verticale dans la barre de progression située juste au dessus de l'écran. La polarité du signal de déclenchement peut être inversée en cliquant sur le bouton Montant situé juste sous l’affichage du niveau de déclenchement, il deviendra alors descendant. Notez que la modification de la position de déclenchement arrête le scope une fois la position ajustée, vous relancez le scope en cliquant sur le bouton Normal du groupe Mode "Run".
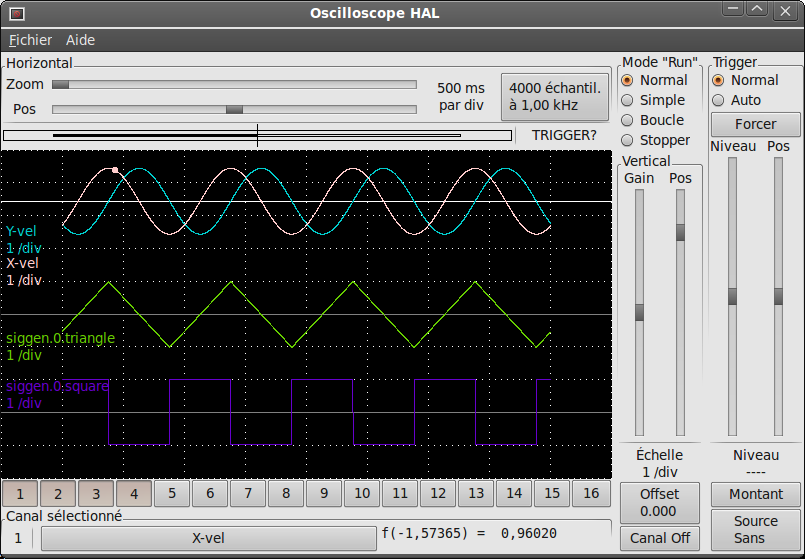
Maintenant que nous avons réglé la position verticale et le déclenchement, l'écran doit ressembler à la figure ci-dessous.
6.6. Ajustement horizontal
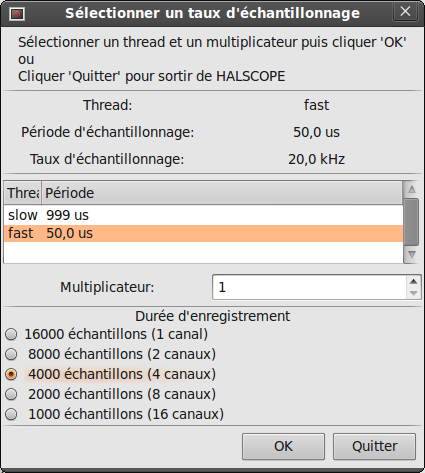
Pour examiner de près une partie d’une forme d’onde, vous pouvez utiliser le zoom au dessus de l'écran pour étendre la trace horizontalement et le curseur de position horizontale, Pos du groupe Horizontal, pour déterminer quelle partie de l’onde zoomée est visible. Parfois simplement élargir l’onde n’est pas suffisant et il faut augmenter la fréquence d'échantillonnage. Par exemple, nous aimerions voir les impulsions de pas qui sont générés dans notre exemple. Mais les impulsions de pas font seulement 50 us de long, l'échantillonnage à 1kHz n’est pas assez rapide. Pour changer le taux d'échantillonnage, cliquer sur le bouton qui affiche le nombre d'échantillons pour avoir le dialogue Sélectionner un taux d'échantillonnage, figure ci-dessous. Pour notre exemple, nous cliquerons sur le thread fast, qui fournira un échantillonnage à environ 20kHz. Maintenant au lieu d’afficher environ 4 secondes de données, un enregistrement sera de 4000 échantillons à 20kHz, soit environ 0.20 seconde.
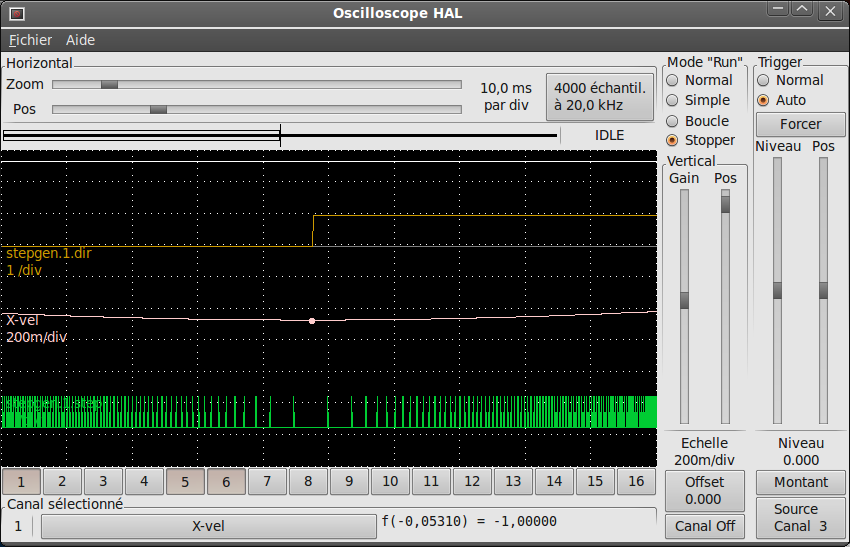
6.7. Plus de canaux
Maintenant regardons les impulsions de pas. halscope dispose de 16 canaux, mais pour cet exemple, nous en utilisons seulement 4 à la fois. Avant de sélectionner tout autre canal, nous avons besoin d’en éteindre certains. Cliquer sur le canal 2, puis sur le bouton Canal Off sous le groupe vertical. Ensuite, cliquez sur le canal 3, le mettre Off et faire de même pour le canal 4. Même si les circuits sont éteints, ils sont encore en mémoire et restent connectés, en fait, nous continuerons a utiliser le canal 3 comme source de déclenchement. Pour ajouter de nouveaux canaux, sélectionner le canal 5, choisir la pin stepgen.0.dir, puis le canal 6 et sélectionner stepgen.0.step. Ensuite, cliquer sur mode Normal pour lancer le scope, ajustez le zoom horizontal à 10 ms par division. Vous devriez voir les impulsions de pas ralentir à la vitesse commandée approcher de zéro, puis la pin de direction changer d'état et les impulsions de pas se resserrer de nouveau en même temps que la vitesse augmente. Vous aurez peut être besoin d’ajuster le gain sur le canal 1 afin de mieux voir l’action de la vitesse sur l'évolution des impulsions de pas. Le résultat devrait être proche de celui de la figure ci-dessous. Ce type de mesure est délicate car il y a un énorme écart d'échelle entre la fréquence des pas et l’action sur la vitesse, d’ou la courbe X-vel assez plate et les impulsions de pas très resserrées.
6.8. Plus d'échantillons
Si vous souhaitez enregistrer plus d'échantillons à la fois, redémarrez le temps réel et chargez halscope avec un argument numérique qui indique le nombre d'échantillons que vous voulez capturer, comme:
halcmd: loadusr halscope 80000
Si le composant scope_rt n’est pas déjà chargé, halscope va le charger et lui demander un total de 80000 échantillons, de sorte que lorsque l'échantillonnage se fera sur 4 canaux à la fois, il y aura 20000 échantillons par canal. (Si scope_rt est déjà chargé, l’argument numérique passé à halscope sera sans effet)