Actualizar LinuxCNCa una nueva versión menor (es decir, a una nueva versión en la misma serie estable, por ejemplo de 2.8.0 a 2.8.1) con su PC conectado a internet es un proceso automático. Verá un mensaje de actualización después del lanzamiento de una version menor nueva, junto con otras actualizaciones de software. Si no tiene internet en su PC vea actualizando sin red
1. Actualizar a la nueva versión
Esta sección describe cómo actualizar LinuxCNC de la versión 2.7 a la nueva 2.8.x versión. Se supone que tiene una instalación 2.7 existente que quiere actualizar.
Para actualizar LinuxCNC desde una versión anterior a 2.7, primero debe actualizar su instalación anterior a 2.7; luego siga estas instrucciones para actualizar a la nueva versión.
Si no tiene una versión anterior de LinuxCNC para actualizar, entonces es mejor hacer una nueva instalación de la nueva versión como se describe en la sección Obtener LinuxCNC.
Para actualizar versiones principales como 2.6 a 2.7 cuando tiene una conexión de red en la máquina, necesita deshabilitar las fuentes apt antiguas de linuxcnc.org y agregar una nueva fuente apt linuxcnc.org para 2.7, luego actualice LinuxCNC.
Los detalles dependerán de la plataforma en la que se esté ejecutando. Abra un
terminal y escriba lsb_release -ic para encontrar esta información:
lsb_release -ic
Distributor ID: Debian
Codename: wheezyDebería estar ejecutando Debian Wheezy (como arriba) o Ubuntu Precise, o Ubuntu Lucid.
1.1. Configuracion de fuentes apt
-
Abra la ventana
Repositorioso Fuentes de software. El proceso para hacer esto se diferencia ligeramente en las tres plataformas soportadas:-
Debian Wheezy:
-
Haga clic en
Menú de aplicaciones, luego enSistema, luego enGestor de Paquetes Synaptic. -
En Synaptic, haga clic en el menú
Configuración, luego haga clic enRepositoriospara abrir la ventanaRepositorios.
-
-
Ubuntu Precise:
-
Haga clic en el icono
Dash Homeen la esquina superior izquierda. -
En el campo
Buscar, escriba "software", luego haga clic en el iconoUbuntu Software Center. -
En la ventana del Centro de software de Ubuntu, haga clic en el menú
Editar, luego haga clic enFuentes de software ...para abrir la ventanaFuentes de software.
-
-
Ubuntu Lucid:
-
Haga clic en el menú
Sistema, luego en` Administración`, luegoAdministrador de paquetes Synaptic. -
En Synaptic, haga clic en el menú
Configuración, luego haga clic enRepositoriospara abrir la ventanaFuentes de software.
-
-
-
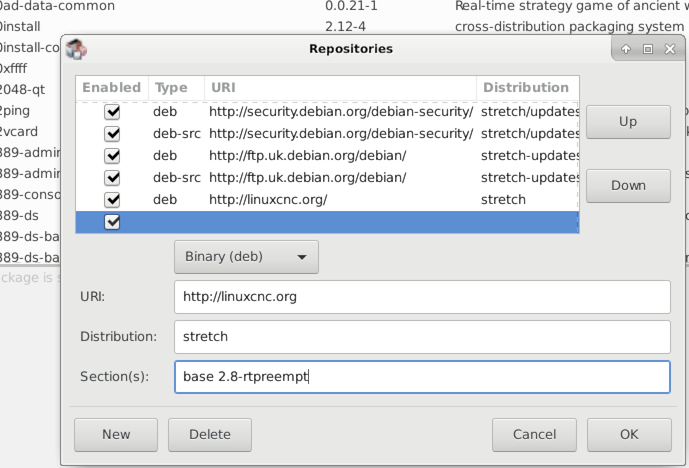
En la ventana
Fuentes de software, seleccione la pestañaOtro software. -
Eliminar o desmarcar todas las entradas de linuxcnc.org antiguas (dejar todas las demas líneas no-linuxcnc.org como estan).
-
Haga clic en el botón
Agregary agregue una nueva línea apt. La linea sera ligeramente diferente en las diferentes plataformas:
| Platform | apt source line |
|---|---|
Debian Stretch |
|
Debian Wheezy |
|
Ubuntu Precise |
|
Debian Jessie - preempt |
|
Debian Jessie - RTAI |
|
Debian Buster - preempt |
|
Debian Buster - RTAI |
|
-
Haga clic en
Agregar fuente, luego` Cerrar` en la ventana de Fuentes de software. Si aparece una ventana que le dice que la información sobre el software disponible está desactualizada, haga clic en el botón "Recargar".
1.2. Actualizando a la nueva version
Ahora su computadora sabe dónde obtener la nueva versión del software. A continuación tenemos que instalarlo.
El proceso nuevamente difiere según su plataforma.
1.2.1. Debian Wheezy y Ubuntu Lucid
Debian Wheezy y Ubuntu Lucid usan Synaptic.
-
Abra Synaptic usando las instrucciones en Configurando fuentes apt más arriba.
-
Haga clic en el botón "Recargar".
-
Use la función de búsqueda para buscar
linuxcnc. -
Haga clic en la casilla de verificación para marcar los nuevos paquetes linuxcnc y linuxcnc-doc-* para actualización. El administrador de paquetes puede seleccionar un número de paquetes adicionales que también se instalarán, para satisfacer las dependencias que tiene el nuevo paquete linuxcnc.
-
Haga clic en el botón "Aplicar" y deje que su computadora instale el nuevo paquete. El viejo paquete linuxcnc se actualizará automáticamente al nuevo.
1.3. Ubuntu Precise
-
Haga clic en el icono
Dash Homeen la esquina superior izquierda. -
En el campo
Buscar, escriba "actualizar", luego haga clic en el iconoAdministrador de actualizaciones. -
Haga clic en el botón Verificar para obtener la lista de paquetes disponibles.
-
Haga clic en el botón
Instalar actualizacionespara instalar las nuevas versiones de todos los paquetes.
2. Actualizacion sin red
Para actualizar sin una conexión de red, necesita descargar un paquete deb y luego instalarlo. con dpkg. buildbot crea nuevos debs cada vez que se actualiza algo y los almacena en http://buildbot.linuxcnc.org/dists/
Tiene que profundizar en el enlace anterior para encontrar el deb correcto para su instalación. Abra un terminal y escriba lsb_release -ic para encontrar el nombre de su sistema operativo. Deberia ser algo como:
> lsb_release -ic
Distributor ID: Debian
Codename: busterElija el sistema operativo de la lista y luego elija la versión principal que desea, como 2.7-rt para en tiempo real o 2.7-sim solo para el simulador.
A continuación, elija el tipo de computadora que tenga; i386 para 32 bits o amd64 para 64 bits.
A continuación, elija la versión que desee de la parte inferior de la lista como linuxcnc-uspace_2.8.0_amd64.deb. Descargue el deb y cópielo a su directorio de usuario. Puede cambiar el nombre del archivo a algo un poco más corto con el administrador de archivos, como linuxcnc_2.8.0.deb. Luego abra un terminal e instálelo con el gestor de paquetes con este comando
sudo dpkg -i linuxcnc_2.8.0.deb3. Actualización de archivos de configuración (para 2.8.x)
La nueva versión de LinuxCNC difiere de la versión 2.7 en algunos aspectos que puede requerir cambios en la configuración de su máquina.
3.1. Configuraciones de distribucion (actualizacion para las articulaciones-ejes)
La distribución de LinuxCNC incluye muchas configuraciones de ejemplo organizadas en jerarquías de directorio llamadas by_machine, by_interface, y sim (maquinas simuladas). Estas configuraciones se utilizan a menudo como puntos de partida para hacer una nueva configuración, como ejemplos de estudio, o como máquinas simuladas completas que pueden ejecutarse sin hardware especial o kernels en tiempo real.
Los archivos de configuración en estos árboles de directorio se han actualizado para los cambios requeridos para las actualizaciones de articulaciones-ejes.
3.2. Actualizaciones automaticas (script update_ini para articulaciones-ejes)
Dado que las actualizaciones de articulaciones-ejes requieren una serie de cambios en los archivos ini del usuario y sus halfiles relacionados, se proporciona un script llamado update_ini para convertir automáticamente configuraciones de usuario.
Este script se invoca cuando un usuario inicia una configuración existente por primera vez después de actualizar LinuxCNC. El script busca el elemento [EMC]VERSION en el archivo ini de usuario. Si este elemento 1) no existe, o 2) existe y está configurado al valor histórico CVS "$Revision$", o es un valor numérico menor que 1.0, el script update_ini abrirá un cuadro de diálogo para ofrecer la edicion de los archivos y crear una configuración actualizada. Si el usuario acepta, se actualizará la configuración.
Por ejemplo, si la configuración de usuario se llama bigmill.ini, el archivo bigmill.ini y sus archivos hal locales asociados se editarán para incorporar los cambios articulaciones-ejes. Todos los archivos de la configuración inicial se guardarán en un nuevo directorio con el nombre de la configuración original, y con el sufijo ".old" (bigmill.old en el ejemplo).
El script update_ini maneja todos los elementos de usuario comunes que se encuentran en máquinas basicas que emplean cinemática de identidad. Elementos menos comunes usados en maquinas más complejas no pueden ser convertidos automáticamente. Ejemplos de maquinas complejas incluyen:
-
Pórticos con dos articulaciones para un eje.
-
máquinas con jogwheels
-
Robots con cinemática no de identidad.
-
Configuraciones utilizando archivos haltcl.
Las siguientes subsecciones y la sección Cambios de Hal enumeran elementos que puede requerir ediciones de usuario adicionales de los archivos ini o hal.
3.3. Soporte de husillos multiples
LinuxCNC admite ahora hasta 8 husillos (y puede volver a compilarse para tener más). El código G existente se ejecutará sin modificaciones y la mayoría de las configuraciones se establecerán de forma predeterminada con husillo único. Para añadir husillos, tanto el modparam "num_spindles" del módulo motion en el archivo HAL, como la entrada [TRAJ]SPINDLES en el archivo INI se deben cambiar/agregar para elegir el número requerido. Ambos deben coincidir.
Los nombres de los pines de control del husillo se han cambiado para hacer que los husillos se parezcan más a ejes y articulaciones. Por ejemplo, motion.spindle-speed-out ahora es spindle.0.speed-out. El script de actualización automática se hará cargo de estos cambios.
Para controlar husillos adicionales, los códigos G y M que controlan la velocidad de husillo aceptan ahora un argumento "$" adicional, por ejemplo M3 $2 para iniciar el tercer husillo. "$" fue elegido para evitar conflictos con cualquier letra de código existente. Debería ser posible crear códigos G personalizados para que coincidan con cualquier otro controlador de husillo múltiple. Consulte los manuales de código G y código M para los cambios de código, y la pagina man motion para los cambios en los pines HAL.
3.4. Nombres de aceleraciones y velocidades en TRAJ
Con la incorporación de la funcionalidad articulaciones-ejes, algunos nombres fueron cambiados para aclarar la nueva funcionalidad disponible.
antes: [TRAJ]MAX_VELOCITY ahora es: [TRAJ]MAX_LINEAR_VELOCITY
antes: [TRAJ]DEFAULT_VELOCITY ahora es: [TRAJ]DEFAULT_LINEAR_VELOCITY
antes: [TRAJ]MAX_ACCELERATION ahora es: [TRAJ]MAX_LINEAR_ACCELERATION
antes: [TRAJ]DEFAULT_ACCELERATION ahora es: [TRAJ]DEFAULT_LINEAR_ACCELERATION3.5. Modulos cinematicos
Los módulos de cinemática gentrivkins y gantrykins se han eliminado ya que su funcionalidad está disponible ahora en el módulo trivkins actualizado.
El módulo gentrivkins solo ha estado disponible en ramas anteriores. Para convertir, es necesario cambiar el nombre.
Ejemplos de archivos Hal:
antes : loadrt gentrivkins
ahora es: loadrt trivkins
antes : loadrt gentrivkins coordinates=xyyz
ahora es: loadrt trivkins coordinates=xyyzLas configuraciones que usaban gantrykins deben actualizarse para usar trivkins con el parámetro kinstype= establecido en BOTH (para KINEMATICS_BOTH).
Ejemplo de archivo Hal:
antes : loadrt gantrykins coordinates=xyyz
ahora es: loadrt trivkins coordinates=xyyz kinstype=BOTHConsulte la página man trivkins para obtener información adicional.
Nota: La forma mejor soportada de especificar cinemática en articulaciones_ejes es establecer los valores en la sección [KINS] del archivo ini y luego hacer referencia a ellos dentro de los [HAL]HALFILES especificados (archivos .hal .tcl). Por ejemplo:
inifile: [KINS]
KINEMATICS = trivkins
JOINTS = 3
...
halfile: loadrt [KINS]KINEMATICS
haltclfile: loadrt $::KINS(KINEMATICS)3.6. Configuraciones de Torno
Antes de la incorporación de articulaciones_ejes, los tornos a menudo se configuraban como si fuesen máquinas de tres ejes (XYZ) con un eje no utilizado (Y). Esto fue conveniente para compartir archivos Hal (especialmente para configuraciones de simulación) pero se requiere la especificación [TRAJ]AXES = 3, una sección AXIS_Y ficticia, y disposiciones para el homing de la coordenada Y no utilizada. Estos arreglos ya no son ni necesarios ni recomendados.
Las configuraciones históricas de torno utilizaron las opciones predeterminadas para los módulo de cinemática trivkins. Estas opciones predeterminadas configuran todas las letras de los ejes (XYZABCUVW). Con la incorporacion de articulaciones_ejes, una especificación cinemática más adecuada establece las coordenadas a las exactamente utilizadas (XZ) y establece el número de uniones en 2. No es necesario una sección de archivo ini [AXIS_Y] y solo necesitan ser definidas dos secciones [JOINT_N].
Ejemplo de elementos de archivo ini para un torno (solo se muestran las secciones relevantes para cinemática):
[KINS]
KINEMATICS = trivkins coordinates=xz
JOINTS = 2
[TRAJ]
COORDINATES = XZ
...
[AXIS_X]
...
[AXIS_Z]
...
[JOINT_0]
...
[JOINT_1]
...Tenga en cuenta que algunas configuraciones de simulación todavía usan configuración histórica de torno.
3.7. Especificaciones de articulaciones-ejes consistentes
Los elementos del archivo ini que afectan el uso de articulaciones y ejes deben ser consistentes.
El módulo de cinemática de movimiento normalmente cargado con [KINS]KINEMATICS= debe usar un número de articulaciones igual al número especificado con [KINS]JOINTS=.
El módulo de cinemática debe implementar letras de eje que sean consistentes con la especificación utilizada por el elemento del módulo de tareas [TRAJ]COORDINATES=.
Ejemplos:
Máquina cartesiana de tres ejes utilizando trivkins (KINEMATICS_IDENTITY):
[KINS]KINEMATICS = trivkins
[KINS]JOINTS = 3
[TRAJ]COORDINATES = XYZTorno de dos ejes utilizando trivkins (KINEMATICS_IDENTITY) con letras del eje no consecutivas:
[KINS]KINEMATICS = trivkins coordinates=XZ
[KINS]JOINTS = 2
[TRAJ]COORDINATES = XZPortico utilizando trivkins con letras de eje duplicadas y KINEMATICS_BOTH para permitir posicionamiento de articulaciones individuales (para homing):
[KINS]KINEMATICS = trivkins coordinates=XYYZ kinstype=BOTH
[KINS]JOINTS = 4
[TRAJ]COORDINATES = XYYZPortico usando trivkins (KINEMATICS_BOTH) con letras de eje duplicadas y un eje rotativo con letras de eje saltadas (A, B saltadas):
[KINS]KINEMATICS = trivkins coordinates=XYYZC kinstype=BOTH
[KINS]JOINTS = 5
[TRAJ]COORDINATES = XYYZCRobot Delta lineal con cinematica no-identidad (KINEMATICS_BOTH) que trabaja en un marco cartesiano con una coordenada rotativa adicional:
[KINS]KINEMATICS = lineardeltakins
[KINS]JOINTS = 4
[TRAJ]COORDINATES = XYZANota: algunos módulos de cinemática de propósito general (como trivkins) implementan cinemática de identidad con soporte para especificación de coordenadas (letras de eje). Las letras de eje pueden ser omitidas. Las letras de eje pueden ser duplicadas. Las articulaciones se asignan a las letras de los ejes de una manera definida ($ man trivkins).
Nota: para la carga del módulo trivkins, no incluya espacios entre el signo = y las letras:
Esto es correcto: [KINS]KINEMATICS = trivkins coordinates=XZ
Esto NO es correcto: [KINS]KINEMATICS = trivkins coordinates = XZNota: los módulos de cinemática personalizados que implementan cinemáticas de no-identidad (como lineardeltakins) definen relaciones específicas de la máquina entre un conjunto de coordenadas y un conjunto de articulaciones. Normalmente, los módulos de cinemática personalizados calculan las relaciones de los ejes y las articulaciones dentro del módulo personalizado, pero es importante utilizar configuraciones consistentes para los elementos de ini relacionados: [KINS]JOINTS y [TRAJ]COORDINATES. Los detalles serán explicados en la página de manual del módulo (por ejemplo, $ man lineardeltakins).
3.8. Secuencias Home
Se pueden usar valores negativos para los elementos del archivo ini [JOINT_n]HOME_SEQUENCE. Antes de la incorporacion de articulaciones_ejes, un valor de -1, o la omisión del elemento, indicaba que no se aplicaba ninguna secuencia. Ahora, solo la omisión del elemento se usa para ese propósito. Consulte el capítulo Configuración de Homing para más información.
3.9. Bloqueo de indexador rotativo (actualizaciones articulaciones-ejes)
Con articulaciones_ejes, un indexador es una articulación que puede ser homeada (modo de articulacion) pero también debe ser desbloqueada desde gcode. Esto requiere una correspondencia uno a uno entre una unica articulación y un unico eje.
Especifique el número de articulacion que corresponde a un eje rotativo (donde L = A, B o C) con una configuración en el archivo ini para el eje como:
[AXIS_L]LOCKING_INDEXER_JOINT = numero_articulacion_del_indexerEspecifique que la articulacion (N es el numero_articulacion_del_indexer) es un indexador bloqueable con una configuración de archivo ini para la articulación como:
[JOINT_N]LOCKING_INDEXER = 1Se pueden crear pines Hal para el uso coordinado de un indicador de bloqueo de articulacion:
joint.N.unlock (BIT salida desde Hal)
joint.N.is-unlocked (BIT entrada a Hal)Para crear estos pines hal para bloqueo de articulaciones, especifique todas las articulaciones que se utilizaran como indexadores bloqueables con el parámetro unlock_joints_mask para el módulo motmod. (bit0(LSB)==>joint0, bit1==>joint1, etc.)
[EMCMOT]
EMCMOT = motmod unlock_joints_mask=BITMASKComo ejemplo, considere una máquina que utiliza cinemática trivkins con coordenadas XYZB, donde B es un indexador bloqueable. Para trivkins, los números de articulacion (a partir de 0) se asignan consecutivamente a las coordenadas especificadas (las letras de eje sin uso pueden ser omitidas). Para este ejemplo, X==>joint0, Y==>joint1, Z==>joint2, B==>joint3. La máscara para especificar la unión 3 es 000001000(binario) == 0x08(hexadecimal)
Las entradas de archivo ini requeridas para este ejemplo XYZB de trivkins son:
[KINS]
JOINTS = 4
KINEMATICS = trivkins coordinates=XYZB
...
[TRAJ]
COORDINATES = XYZB
...
[EMCMOT]
EMCMOT = motmod unlock_joints_mask=0x08
...
[AXIS_B]
LOCKING_INDEXER_JOINT = 3
...
[JOINT_3]
LOCKING_INDEXER = 1
...Para una cinemática más compleja, seleccione el número de articulacion según sea necesario; debe haber una correspondencia uno a uno entre el eje rotativo y el número de articulación.
(Consulte la página man motion para obtener más información sobre motmod)
3.10. Sintaxis estricta de archivos INI
Las líneas con variables INI numéricas ya no pueden seguirse de texto. En versiones anteriores de LinuxCNC, cualquier texto después del número era ignorado silenciosamente, pero a partir de esta versión, tal texto está totalmente prohibido. Esto incluye caracteres hash ("#"), que en esta posición son parte del valor, no un carácter de comentario.
Por ejemplo, líneas como esta ya no serán aceptadas:
MAX_VELOCITY = 7.5 # Esta es la velocidad máxima del eje.Podrían transformarse en pares de líneas como esta:
# Esta es la velocidad máxima del eje.
MAX_VELOCITY = 7.53.11. Configuraciones [TRAJ]
En las versiones 2.7.x, la configuración de planificación de trayectoria ([TRAJ]) incluía:
[TRAJ]
DECELULT_ACCELERATION
MAX_ACCELERATIONEl trabajo provisional preparado para distintos elementos lineales y angulares renombraba estos elementos como:
[TRAJ]
DEFAULT_LINEAR_ACCEL
MAX_LINEAR_ACCELComo estos nombres abreviados eran inconsistentes con otras convenciones y la implementación del script update_ini, los nombres provisionales se han corregido para usar:
[TRAJ]
DEFAULT_LINEAR_ACCELERATION
MAX_LINEAR_ACCELERATION|
Nota
|
No se han implementado soporte para especificar la planificación de trayectoria angular predeterminada y aceleraciones máximas. |
4. Cambios de Hal (actualizacion articulaciones-ejes 2.8.x)
4.1. Rueda o MPG (generador de impulsos manual) de jogging
Antes de la incorporación de las actualizaciones de articulaciones_ejes, el jog de volante se soportaba solo en modo articulacion y controlado con pines hal:
bit IN axis.M.jog-enable
float IN axis.M.jog-scale
s32 IN axis.M.jog-counts
bit IN axis.M.jog-vel-modedonde M es un número correspondiente a una letra de eje (0==>X, 1==>Y, etc.)
Con la incorporación de las actualizaciones de articulaciones_ejes, el jogging está disponible para articulaciones en modo de articulacion y para cada eje de coordenadas en modo teleop. Los pines hal de control son:
bit IN joint.N.jog-enable
float IN joint.N.jog-scale
s32 IN joint.N.jog-counts
bit IN joint.N.jog-vel-mode
bit IN axis.L.jog-enable
float IN axis.L.jog-scale
s32 IN axis.L.jog-counts
bit IN axis.L.jog-vel-modedonde N es un número de articulacion y L es una letra de eje.
Para utilizar un MPG en configuraciones de cinematica de identidad, donde hay correspondencia uno a uno de un número de articulacion y una letra de eje, puede ser conveniente conectar los pines hal correspondientes. Por ejemplo, si la articulación 1 corresponde exactamente al eje Y:
net jora_1_y_enable => joint.1.jog-enable => axis.y.jog-enable
net jora_1_y_scale => joint.1.jog-scale => axis.y.jog-scale
net jora_1_y_counts => joint.1.jog-counts => axis.y.jog-counts
net jora_1_y_vel-mode => joint.1.jog-counts => axis.y.jog-vel-mode(Los nombres de las señales jora_1_y_* son ejemplos, los nombres anteriores a la conversión articulaciones_ejes dependerá de los detalles de configuración específicos.)
Las configuraciones con cinemática de no-identidad y configuraciones que utilizan letras de eje duplicadas (por ejemplo, pórticos que usan más de una articulación para una eje coordenado) requerirán una lógica de control independiente apropiada para admitir Jogging tanto de articulacion como teleop.
4.2. Pines Ini Hal
Los pines Hal se crean para los elementos del archivo ini para [JOINT_N] y [AXIS_L]:
Desde N = 0, hasta [KINS](JOINTS-1)
Item en Ini nombre pin hal
[JOINT_N]BACKLASH ini.N.backlash
[JOINT_N]FERROR ini.N.ferror
[JOINT_N]MIN_FERROR ini.N.min_ferror
[JOINT_N]MIN_LIMIT ini.N.min_limit
[JOINT_N]MAX_LIMIT ini.N.max_limit
[JOINT_N]MAX_VELOCITY ini.N.max_velocity
[JOINT_N]MAX_ACCELERATION ini.N.max_acceleration
[JOINT_N]INICIO ini.N.home
[JOINT_N]HOME_OFFSET ini.N.home_offsetPara L = x y z a b c u v w:
Item en Ini nombre pin hal
[AXIS_L]MIN_LIMIT ini.L.min_limit
[AXIS_L]MAX_LIMIT ini.L.max_limit
[AXIS_L]MAX_VELOCITY ini.L.max_velocity
[AXIS_L]MAX_ACCELERATION ini.L.max_accelerationNota: En versiones anteriores de LinuxCNC (antes de las actualizaciones de articulaciones_ejes), los nombres de los pines hal ini.N.* se referian a los ejes con 0==>x, 1==>y, etc. (los pines fueron creados para los 9 ejes) Vea la página man ($ man milltask) para más información.
5. Cambios Hal (Otros)
5.1. halcompile
El número de instancias names= se limitaba anteriormente a 16. Ahora, para los componentes en tiempo real (loadrt), las instancias se asignan dinámicamente sin límite incorporado. El limite de 16 todavia se aplica a items names= para componentes de espacio de usuario (loadusr).
Para los componentes que usan personality, el número máximo ahora se puede configurar mediante una opción de línea de comando -P|--personalities.
5.2. Cambios Parametro a Pin
Los siguientes pines de salida hal fueron cambiados de parámetros a pines para que puedan conectarse a señales:
motion.servo.last-period (último periodo servo en clks)
motion.servo.last-period_ns (disponibilidad dependiente del kernel)6. Cambios de interfaz para articulaciones-ejes 2.8.x
6.1. modulo python linuxcnc
La interfaz jog() incluye una bandera de articulacion (joint-flag) para especificar jogging de articulacion (True) o teleop (False):
jog(comando, joint-flag, eje-o-número-articulacion, velocidad[, distancia]])
jog(linuxcnc.JOG_STOP, joint-flag, eje-o-número-articulacion)
jog(linuxcnc.JOG_CONTINUOUS, joint-flag, joint-flag, velocidad)
jog(linuxcnc.JOG_INCREMENT, joint-flag, eje-o-número-articulacion, velocidad, distancia)7. GUIs (actualizaciones para articulaciones-ejes 2.8.x)
7.1. Notas sobre el jogging de articulaciones-ejes, homing y cinematica
Con la incorporación de las actualizaciones de articulaciones_ejes, LinuxCNC hace cumplir la distinciones de articulaciones y ejes (letras de coordenadas), pero algunas guis (como Axis) puede ocultar algunas de las distinciones para máquinas simples.
En la mayoría de los casos, puede pensar en las articulaciones como motores.
Las relaciones entre articulaciones y ejes de coordenadas son determinadas por las funciones cinemáticas matemáticas que describen un movimiento de la máquina.
Las coordenadas universales (X, Y, Z, A, B, C, U, V, W) se determinan aplicando operaciones de cinemática DIRECTA a posiciones articulares (motor).
Al moverse en el espacio universal (por ejemplo, movimientos de código G), se requiere que las posiciones de articulaciones (motor) se determinen aplicando operaciones de cinemática INVERSA a las coordenadas solicitadas para el movimiento en el espacio universal.
Moverse en el espacio universal es posible solo después de homing.
Para máquinas simples (como fresadoras y tornos) hay una equivalencia uno a uno de articulaciones y ejes de coordenadas. Por ejemplo, en una fresadora XYZ, las relaciones son típicamente: axisX == joint0, axisY == joint1, axisZ = joint2. Esta correspondencia se caracteriza como cinemática IDENTIDAD y el módulo de cinemática que se utiliza habitualmente es trivkins (cinemática trivial). (Ver página man $ man trivkins)
El jogging de articulacion (por número de articulacion 0,1, …) se utiliza en modo articulacion (usado generalmente solo ANTES de homing). Cuando se completa homing, el modo de jogging se cambia "AUTOMÁTICAMENTE" del modo articulacion al al modo universal y se usa el jogging de ejes (letra de coordenada X, Y, …). Esto es apropiado para todos los movimientos gcode solicitados por los comandos MDI o por programas gcode.
Aunque el jogging en modo articulacion a menudo no se requiere después de homing, algunas guis (como Axis) proporcionan un atajo de teclado ($) para permitir alternar entre los modos articulacion y universal (teleop) para máquinas que utilizan cinemática NO-IDENTIDAD.
En muchas situaciones comunes, el jogging de articulacion no es necesario ya que la orientación se lleva a cabo utilizando los interruptores de home y/o los diferentes métodos proporcionados por LinuxCNC. Simplemente se enciende la máquina, se emite el comando Home-All y la máquina hace home y cambia al modo universal automáticamente. Ver Configuración de Homing
Las máquinas que no usan interruptores home pueden requerir un jogging manual en modo articulacion antes de volver a home cada articulación. Tambien es posible utilizar home inmediato (ver los documentos de homing) para articulaciones que no requieren homing en una posición fija.
Aunque una gui puede ocultar las distinciones de articulaciones/ejes para máquinas de cinemática IDENTIDAD, por lo general es importante completar homing para ejecutar programas o usar funciones provistas por una gui.
Por defecto, el módulo trivkins se declara como si tuviera cinemática de IDENTIDAD. Las distincion de operaciones articulacion/universal pueden hacerse visibles en la gui Axis al usar trivkins configurando el tipo de cinemática a un tipo NO-IDENTIDAD utilizando kinstype=both. El ajuste both indica que ambas funciones de cinemática, directa e inversa, están disponibles y no deben ser empleadas las disposiciones de la gui que esconden las distinciones de articulaciones y ejes. Por ejemplo, para una configuración xyz, especificar:
[KINS]
KINEMATICS = trivkins coordinates=xyz kinstype=bothCon este ajuste, se utilizará la cinemática de identidad pero la gui Axis podra:
-
Mostrar los números de articulacion antes del homing.
-
Mostrar las letras de los ejes después de homing correcto
-
soporte para alternar entre los modos articulacion y teleop con la tecla $
7.2. Halui
Halui ahora admite el jogging teleop que da como resultado algunos nombres de pin modificados y numerosos nombres nuevos para pines relacionados con el jogging.
Consulte la página man ($ man halui) para ver todos los nombres de los pines.
7.2.1. jogging TELEOP o universal
Los nuevos pines para jogging teleop son:
halui.axis.jog-speed
halui.axis.jog-deadband
halui.axis.L.plus
halui.axis.L.minus
... etc.donde L es una letra correspondiente a una de las letras de eje especificadas por [TRAJ]COORDINATES o seleccionadas para el eje seleccionado por los pines halui.axis.L.select.
7.2.2. Jogging de articulacion
Todos los pines para jogging de articulacion fueron renombrados por especificidad:
antes: halui.jog-speed ahora es: halui.joint.jog-speed
antes: halui.jog-deadband ahora es: halui.joint.jog-deadband
antes: halui.jog.N.plus ahora es: halui.joint.N.plus
antes: halui.jog.N.minus ahora es: halui.joint.N.minus
... etcétera ...etcétera.donde N es un número de articulacion (0 … num_joints-1) o seleccionado para la articulación seleccionada por los pines halui.joint.N.select.
7.2.3. Renombrado de pin adicionales
Los pines hal para articulaciones "seleccionadas" fueron renombrados por consistencia con pines relacionados.
antes: halui.joint.selected.is_homed
ahora es: halui.joint.selected.is-homed
antes: halui.joint.selected.on-soft-limit
ahora es: halui.joint.selected.on-soft-min-limit7.3. GUI AXIS
7.3.1. Cinematica de identidad
La gui Axis sigue soportando configuraciones de cinemática de identidad. Esta gui oculta las distinciones de ejes y articulaciones para simplificar la visualización y utilización de máquinas simples.
7.3.2. Cinematica de casos especiales.
Algunas máquinas, típicamente pórticos, pueden usar una configuración con más de una articulación asignada a una letra de eje. Esto se puede hacer con el módulo de cinemática trivkins utilizando letras de coordenadas repetidas. Por ejemplo, una máquina configurada con ajustes ini:
[KINS]
KINEMATICS = trivkins coordinates=XYYZ kinstype=BOTH
...
[TRAJ]
COORDINATES = XYYZ
...Esta máquina, después del homing, tiene una correspondencia de uno a uno entre una sola letra del eje (Y) y un par de articulaciones (1,2). Usando kinematics=BOTH se permite el control individual en modo de articulación si/cuando es necesario.
7.3.3. Cinematica no-identidad.
La gui Axis admite configuraciones que utilizan cinemáticas no-identidad con:
-
Teclas conmutadora ($) para alternar el modo articulacion o teleop
-
Vista previa de la pestaña de articulaciones o ejes según el modo de articulación o teleop
-
Vista preliminar de la pestaña de los íconos Home y Límite en modo articulación
-
Vista previa de la pestaña All-homed e ícono Any-limit en modo teleop
-
pestaña DRO de articulación o ejes según modo de articulación o teleop
-
El jogging es compatible con los modos de movimiento articulación y teleop
-
Se detectan los cambios externos en el modo de movimiento articulación/teleop.
7.3.4. Iconos Home
Para la cinemática de identidad, se muestran los iconos Home para la correspondiente letra de eje (uno a uno) cuando una articulación está homeada.
Para cinemáticas no-identidad, se muestran los íconos Home para articulaciones individuales cuando una articulación está homeada en modo de visualización de articulaciones. Se muestra un icono All-homed para todas las letras de los ejes cuando TODAS las articulaciones están ubicadas en modo de visualización mundial.
7.3.5. Iconos de Limite
Para las cinemáticas de identidad, se muestran los íconos de Límite para las correspondientes letra de eje (uno a uno) cuando un límite de articulacion está activo.
Para cinemáticas sin identidad, se muestran los íconos Limite para articulaciones individuales cuando el límite de articulacion está activo en el modo de visualización de articulaciones. Se muestra un icono Cualquier límite si alguna articulacion está en un límite en el modo de visualización teleop.
7.3.6. Teclas conmutadoras para un cuarto eje
En la interfaz gráfica de AXIS, las teclas de jogging se asignan a los ejes en un modo configurable. Para máquinas de 3 ejes, máquinas XYZA y tornos, el valor predeterminado es lo mismo que en 2.7. Para otras máquinas, los 4 pares de teclas de jogging son asignados a los primeros 4 ejes que existen en el orden XYZ ABC UVW. Estas asignaciones pueden ser controladas por nuevas directivas inifile en la sección [DISPLAY] del archivo ini.
Tenga en cuenta que los parámetros utilizados para jogging pueden no ser apropiados para ambos modos en máquinas con cinemática no-identidad.
7.4. tklinuxcnc
La gui tklinuxcnc admite cinemáticas tanto de identidad como de no identidad, incluye botones de radio y una combinación de teclas ($) para alternar los modos de conexión articulacion y teleop. Se detectan cambios externos de modo de movimiento articulacion o teleop. El jogging se admite en los modos de movimiento articulacion y teleop. Tenga en cuenta que los parámetros utilizados para jogging pueden no ser apropiados para ambos modos en máquinas con cinemática no-identidad.
OpenGL no es utilizado por tklinuxcnc, por lo que puede usarse para aislar problemas y dependencias del sistema que se producen con guis más modernas como Axis.
Una rudimentaria gui con backplot está disponible para su uso con configuraciones de máquina con cinemáticas de identidad (xyz).
7.4.1. comandos emcsh
El código de emcsh.cc proporciona el conjunto de comandos tcl utilizados por tklinuxcnc. Los comandos están disponibles para las aplicaciones tcl como el paquete tcl denominado Linuxcnc. Una serie de comandos requerían previamente el uso de un argumento numérico para especificar una coordenada de eje (0--> X, 1--> Y, …, 8--> W). Estos comandos se han simplificado para usar un argumento que es solo la letra de la coordenada.
Los comandos que ahora usan un argumento de letra de coordenada son:
-
emc_pos_offset
-
emc_abs_cmd_pos
-
emc_abs_act_pos
-
emc_rel_cmd_pos
-
emc_rel_act_pos
-
emc_tool_offset
-
emc_probed_pos
7.5. touchy
La interfaz touchy sigue soportando las configuraciones de cinemática de identidad que soportaba antes de la incorporación de articulaciones_ejes. El jogging se realiza en modo teleop.
7.6. gscreen
Gscreen continúa soportando las configuraciones de cinemática de identidad que soportaba antes de la incorporación de articulaciones_ejes. El jogging se realiza en modo teleop.
7.7. gmoccapy
La interfaz gráfica de gmoccapy sigue siendo compatible con las configuraciones de cinemática de identidad que soportaba antes de la incorporación de articulaciones_ejes. El jogging se realiza en modo teleop.
7.8. Renombrado del Controlador shuttlexpress a shuttle
El controlador HAL para el dispositivo Contour Designs ShuttleXpress ha sido renombrado de "shuttlexpress" a solo "shuttle". Si sus archivos hal incluyen alguna variante de "loadusr shuttlexpress", reemplace "shuttlexpress" con "shuttle".
Se ha agregado soporte para ShuttlePRO, una versión más grande de ShuttleXpress, por lo que el antiguo nombre del driver ya no es exacto.
7.9. linuxcncrsh
"Home All" ahora es compatible con el subcomando home set usando -1 para el número de articulacion.
Los comandos de jogging se han modificado para acomodar ambos joggings, de articulacion (free) y teleop (universal).
antes: set jog joint_number speed
ahora es: set jog joint_number|axis_letter speed
antes: set jog_incr joint_number speed increment
ahora es: set jog_incr joint_number|axis_letter speed increment
antes: set jog_stop
ahora es: set jog_stop joint_number|axis_letterNota: Pruebe el modo teleop usando el comando: get teleop_enable Si TELEOP_ENABLE = YES, use axis_letter de lo contrario use joint_number
Nota: Anteriormente, el comando set jog 0 1.234 activaría el eje cero (X) con velocidad solicitada = 1.234 en cualquier modo (libre o teleop). Este comando ahora intenta desplazar la articulacion cero (Joint0) si el modo es free (no teleop). Para mover el eje X, el modo debe ser teleop y el comando correspondiente es: set jog x 1.234
8. Herramientas
8.1. Calibración (emccalib.tcl)
La calibración/ajuste de herramienta ahora admite estrofa:
[JOINT_N], [AXIS_L], [SPINDLE_S], [TUNE]donde N es un número de articulacion (0 .. ([KINS] JOINTS-1)), L es una letra de coordenadas del eje (X, Y, Z, A, B, C, U, V, W), y S es un número de husillo (0 .. 9)
|
Nota
|
El número de husillos permitidos es 8 pero las configuraciones heredadas puede incluir una estrofa [SPINDLE_9] no relacionada con un número de husillo real. |
|
Nota
|
La estrofa [TUNE] puede usarse para especificar elementos ajustables no relevante para las otras estrofas admitidas. |
9. Guis obsoletas (eliminadas en 2.8.x)
Los guis mini, keystick y xlinuxcnc se han eliminado conjuntamente con la incorporación de articulaciones_ejes. Todo el código fuente relacionado, los ejemplos y la documentación están disponibles en el repositorio de git.
10. Guis en desuso (marcadas en 2.8.x)
La gui linuxcnclcd es candidata para su eliminación. Si se eliminara este componente, todo el código fuente relacionado, ejemplos, y la documentación estará disponible en el repositorio de git.
11. Configuraciones de simulador (actualizacion de articulaciones-ejes)
11.1. Pre-articulaciones-ejes
Antes de la incorporación de articulaciones_ejes, los halfile utilizados en las configuraciones sim normalmente eran compatibles con una fresadora común: un sistema cartesiano con cinemática trivial y tres ejes denominados X Y Z. Un halfile típico tenia estas entradas:
[HAL]
HALFILE = core_sim.hal
HALFILE = sim_spindle_encoder.hal
HALFILE = axis_manualtoolchange.hal
HALFILE = simulated_home.halLas configuraciones de torno a menudo compartían los mismos halfile y usaban el expeditivo método de especificar 3 ejes con Y sin usar. Configuraciones de simulación más complejas proporcionaron conjuntos específicos de valores de acuerdo al propósito de la configuración.
11.2. Post-articulaciones/ejes
Con la incorporación de la funcionalidad articulaciones_ejes, muchas sims proporcionadas en la distribución aprovechan ahora un halfile de propósito general que soporta numerosas configuraciones automáticamente. En una configuración típica sim, la especificación HALFILE es:
[HAL]
HALFILE = LIB:basic_sim.tclEl HALFILE basic_sim.tcl soporta una cantidad de funciones requeridas normalmente, para cualquier número de articulaciones según lo especificado por:
[KINS]
...
JOINTS = número_de_articulaciones
...Las funciones soportadas incluyen:
-
ddts - los componentes de diferenciacion hal son cargados y conectados para cada articulacion (xy, xyz para máquinas trivkins)
-
simulated_home - un componente hal sim_home_switch se carga y conecta a cada articulación. Las condiciones de home son especificadas por los habituales elementos del archivo ini [JOINT_n]HOME_*.
-
use_hal_manualtoolchange - El componente de espacio de usuario hal_manualtoolchange se carga y se conecta.
-
sim_spindle - el componente sim_spindle se carga y se conecta a componentes hal adicionales cargados para simular la inercia de rotación de la masa del husillo.
Las funciones están activadas por defecto pero pueden ser excluidas usando las opciones: -no_make_ddts, -no_simulated_home, -no_use_hal_manualtoolchange, -no_sim_spindle.
Por ejemplo, para omitir la creación de ddts:
HALFILE = LIB:basic_sim.tcl -no_make_ddtsOmitir una o más de las funciones principales permite realizar pruebas sin la función, o la adición de nuevos HALFILE para implementar o ampliar la funcionalidad por defecto omitida
11.2.1. Archivo de comandos Hal equivalentes
Cuando se usa LIB:basic_sim.tcl, se crea un halfile equivalente (en el directorio de configuración) para mostrar los comandos halcmd emitidos. El nombre del archivo se basa en el nombre del archivo inifile con _cmds anexado al nombre base y una extensión de archivo .hal convencional. Ejemplo:
inifilename: ejemplo.ini
nombre_de_archivo_equivalente: ejemplo_cmds.halEl archivo halfile equivalente reemplaza instancias anteriores de archivos con el mismo nombre de archivo. Sustituciones de variables especificadas en el inifile e interpretadas por halcmd se sustituyen automáticamente en el halfile *_cmds.hal creado. Si hay [HAL]HALFILEs especificados antes de LIB:basic_sim.tcl, sus comandos halcmd también están incluidos en *_cmds.hal.
El halfile equivalente se puede utilizar para crear una nueva configuración basada en la configuración original, pero hecha con LIB:basic_sim.tcl con los siguientes pasos:
1) Ejecutar la configuración del simulador para crear un nuevo halfile equivalente, por ejemplo: ejemplo_cmds.hal.
Para utilizar este nuevo halfile equivalente en el inifile de configuración original del simulador (o una copia de él), edite y cambie:
[HAL]
HALFILE = LIB:basic_sim.tcl other_parametersa:
[HAL]
HALFILE = ./ejemplo_cmds.hal11.2.2. Notas
Todos los componentes y conexiones realizadas por LIB:basic_sim.tcl se pueden ver utilizando halcmd. La configuración completa de hal (excepto para los componentes de espacio de usuario cargados con loadusr) se pueden guardar en un archivo usando:
$ halcmd save > hal.saveEl uso de LIB:basic_sim.tcl reduce el esfuerzo necesario para realizar una configuracion de simulación, ya que maneja la mayor parte de la carga de componentes requerida y conexiones hal.
La configuración sim Configuraciones de muestra /sim/axis/minimal_xyz.ini demuestra una configuración xyz en funcionamiento que usa LIB:basic_sim.tcl con un número mínimo de configuraciones de archivos ini.
12. Actualizaciones miscelaneas para 2.8.x
Los commits a las ramas no liberadas pueden realizar cambios que afectan a los evaluadores y los primeros en adoptar el software inédito.
12.1. Pines de movimiento
Nuevos pines (ver la página del hombre de movimiento para más información):
--- axis.L.jog-accel-fraction joint.N.jog-accel-fraction ---
12.2. Pines Hal
Cambios de nombre:
antes: axis.L.vel-cmd
ahora es: axis.l.teleop-vel-cmdNuevos pines:
motion.homing-inhibit (ver la página man motion)12.3. Actualizaciones de componentes Hal
-
siggen: nuevo pin reset para establecer los valores de la señal de salida en un estado predefinido
-
biquad: tipo de pins, f0, Q, s1, s2 eran anteriormente params
12.4. Soporte para volante colgante XHC-HB04
12.4.1. xhc_hb04_util.comp (componente auxiliar)
Retirado el pin no utilizado jogenable-off
Agregado el pin amux-enable para que las reducciones de aceleración multiplexadas estén ahora habilitada por un ANDing de los pines: is-manual y amux-enable. Estos dos pines normalmente están conectados a halui.mode.is-manual y halui.mode.is-teleop respectivamente.
12.4.2. xhc_hb04.tcl (halfile LIB de configuración opcional)
Remove signal pendant:jogenable-off for removed pin pendant_util.jogenable-off
Soporta nuevos pines motion para reducir las aceleraciones (axis.L.jog-accel-fraction, joint.N.jog-accel-fraction) para jogging de volante. El uso de [APPLICATIONS]APP=xhc-hb04-accels ya no es compatible. Se aplican reducciones de aceleración solo para jogging de volante (no para comandos nml) emitido por guis).
12.5. Soporte para el colgante XHC-WHB04B-6
Vea la documentacion del componente xhc-whb04b-6.
12.6. bldc3_hall
El componente bldc_hall3 se ha eliminado. El componente bldc es mas flexible y mejor probado.
12.7. [JOINT_n]HOME_SEQUENCE Valores iniciales
Los valores iniciales de secuencia pueden ser 0, 1 (o -1) solamente. Ver la Documentación de "Configuración de Homing" para más información.
12.8. [JOINT_n]HOME_SEQUENCE Valores negativos
Las articulaciones que usan un HOME_SEQUENCE negativo no están autorizadas a correr en modo articulacion para evitar la desalineación en pórticos. Como siempre, las máquinas con cualquier tipo de cinemática deben ser homeadas antes de habilitar el modo jogging universal convencional.
12.9. Compatibilidad TWOPASS para la configuracion compleja de elementos loadrt
Se ha agregado la compatibilidad con twopass para loadrt config modparams con múltiples configuraciones separadas por espacios en blanco y entre comillas. Ejemplo:
loadrt hm2_eth board_ip=10.10.10.10 config="num_encoders=2 num_pwmgens=2 num_stepgens=3"13. Cambios 2.8.x
Las versiones futuras de este documento tendrán en cuenta los cambios realizados en la rama de desarrollo posteriores a la ultima versión 2.8.x.