Este documento proporciona una referencia de los conceptos básicos de HAL.
1. Comandos HAL
Se puede encontrar información más detallada en la página del manual de halcmd; ejecutar man halcmd en una ventana de terminal.
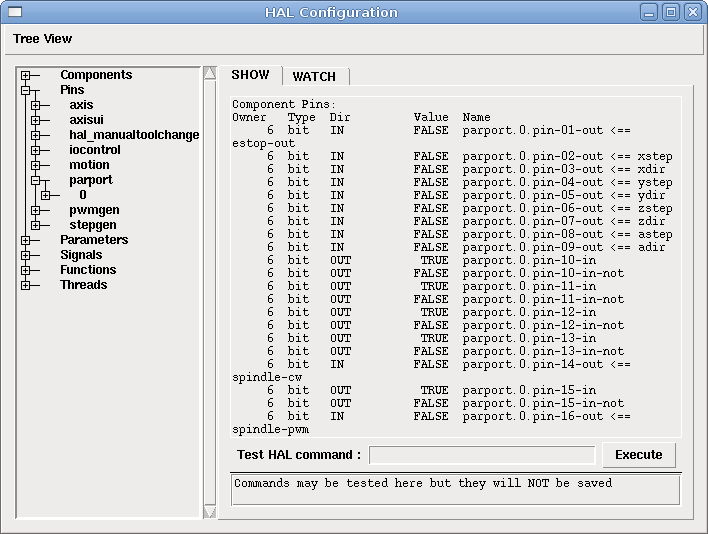
Para ver la configuración de HAL y verificar el estado de los pines y parámetros, use la ventana de configuración de HAL en el menú Máquina en AXIS. Para ver el estado de un pin, abra la pestaña Ver y haga clic en cada pin de su interés, que se agregará a la ventana de observación.
1.1. loadrt
El comando loadrt carga componentes HAL en tiempo real. Las funciones de los componentes de tiempo real deben agregarse a un hilo para ejecutarse a la velocidad de ese hilo. No puede cargar un componente de espacio de usuario en el espacio de tiempo real.
Sintaxis y ejemplo:
loadrt <componente> <opciones>
loadrt mux4 count=11.2. addf
Sintaxis y ejemplo:
addf <función> <thread>
addf mux4.0 servo-threadAgrega la función funct al hilo thread. El valor predeterminado es agregar la función en el orden en que están en el archivo. Si se especifica posición, agrega la función en ese punto del hilo. Una posición negativa significa posición con respecto al final del hilo. Por ejemplo, 1 es al inicio del hilo, -1 es al final de el hilo, -3 es la tercera desde el final.
Es importante cargar algunas funciones en un orden determinado, como por ejemplo las funciones de lectura y escritura de puerto paralelo. El nombre de la función suele ser el nombre del componente más un número. En el siguiente ejemplo se carga el componente or2 y show function muestra el nombre de la función or2
$ halrun
halcmd: loadrt or2
halcmd: show function
Exported Functions:
Owner CodeAddr Arg FP Users Name
00004 f8bc5000 f8f950c8 NO 0 or2.0Debe agregar una función de un componente HAL en tiempo real a un hilo para que la función se ejecute a la velocidad del hilo.
Por lo general hay dos hilos, como se muestra en este ejemplo. Algunos componentes usan punto flotante matemático y se debe agregar a un hilo que admita punto flotante. La columna FP indica si la matemática de coma flotante es compatible con ese hilo.
$ halrun
halcmd: loadrt motmod base_period_nsec=55555 servo_period_nsec=1000000 num_joints=3
halcmd: show thread
Realtime Threads:
Period FP Name ( Time, Max-Time )
995976 YES servo-thread ( 0, 0 )
55332 NO base-thread ( 0, 0 )-
base-thread (el hilo de alta velocidad): este hilo maneja elementos que necesita una respuesta rápida, como hacer pulsos de paso o leer y escribir del/al puerto paralelo. No es compatible con matemática de coma flotante.
-
servo-thread (el hilo de baja velocidad): este hilo maneja los elementos que puede tolerar una respuesta más lenta, como el controlador de movimiento, ClassicLadder, y el controlador de comandos de movimiento. Admite matemáticas de coma flotante.
1.3. loadusr
Sintaxis y ejemplos:
loadusr <componente> <opciones>
loadusr halui
loadusr -Wn spindle gs2_vfd -n spindleEsto ultimo significa: loadusr espera la carga del componente spindle, que es un componente gs2_vfd, nombrado como spindle
El comando loadusr carga un componente HAL en espacio de usuario. Los programas en espacio de usuario tienen sus propios procesos separados que, opcionalmente, se comunican con otros componentes HAL a través de pines y parámetros. No puede cargar componentes de tiempo real en el espacio de usuario.
Las banderas pueden ser una o más de las siguientes:
|
-W
|
Esperar a que el componente esté listo. Se supone que el componente tienen el mismo nombre que el primer argumento del comando. |
|
-Wn<nombre>
|
Esperar al componente, que tendrá el <nombre> dado. Esto solo se aplica si el componente tiene una opción de nombre. |
|
-w
|
Esperar a que el programa termine. |
|
-i
|
Ignorar el valor de retorno del programa (con -w). |
|
-n
|
Nombrar un componente cuando es una opción válida para ese componente. |
1.4. net
Sintaxis y ejemplo:
net nombre-señal nombre-pin <flecha opcional> <segundo nombre-pin opcional>
net home-x joint.0.home-sw-in <= parport.0.pin-11-inEl comando net crea una conexión entre una señal y uno o más pines. Si la señal no existe, net crea la nueva señal, evitando el uso del comando newsig. Las flechas de dirección opcionales <=, => y <=> sirven para que sea más fácil seguir la lógica al leer una línea de comando net, pero no son utilizadas por el propio comando. Las flechas de dirección debe estar separadas por un espacio de los nombres de los pines.
En el ejemplo, home-x es el nombre de la señal, joint.0.home-sw-in es un pin Dirección IN, <= es la flecha de dirección opcional, y parport.0.pin-11-in es un pin Dirección OUT. Esto puede parecer confuso pero las etiquetas de entrada y salida para un pin de puerto paralelo indican la forma física en la que el pin funciona, no como se maneja en HAL.
Se puede conectar un pin a una señal, si obedece las siguientes reglas:
-
Un pin IN siempre se puede conectar a una señal.
-
Un pin IO se puede conectar si no hay un pin OUT conectado a la señal.
-
Un pin OUT se puede conectar solo si no hay otros pines OUT o IO en la señal
El mismo nombre-señal se puede usar en múltiples comandos net para conectar pines adicionales, siempre que se obedezcan las reglas anteriores.
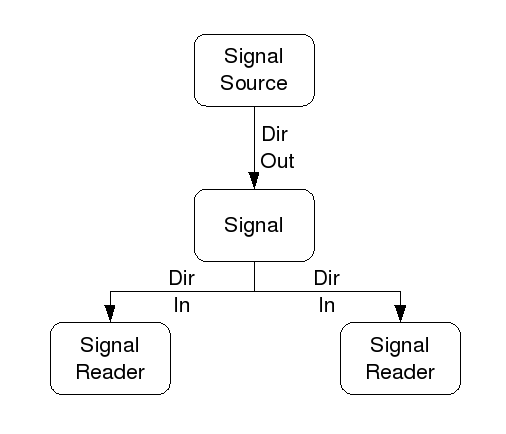
El siguiente ejemplo muestra la señal xStep, siendo la fuente stepgen.0.out, y con dos lectores, parport.0.pin-02-out y parport.0.pin-08-out. Básicamente, el valor de stepgen.0.out se envía a la señal xStep y ese valor se envía a parport.0.pin-02-out y parport.0.pin-08-out.
# señal fuente destino1 destino2
net xStep stepgen.0.out => parport.0.pin-02-out parport.0.pin-08-outDado que la señal xStep ya contiene el valor de stepgen.0.out (la fuente) puede usar la misma señal nuevamente para enviar el valor a otro lector. Para hacer esto, simplemente use la señal, con los nuevos lectores, en otra línea.
net xStep => parport.0.pin-02-outUn pin de E/S, como encoder.N.index-enable, se puede leer o establecer tal como lo permita el componente.
1.5. setp
Sintaxis y un ejemplo:
setp <nombre-pin/parámetro> <valor>
setp parport.0.pin-08-out TRUEEl comando setp establece el valor de un pin o parámetro. Los valores validos dependerán del tipo de pin o parámetro. Es un error si los tipos de datos no coinciden.
Algunos componentes tienen parámetros que deben establecerse antes de su uso. Los parámetros se pueden configurar antes de usarse o mientras se ejecuta el componente, según sea necesario. No puede usar setp en un pin que está conectado a una señal.
1.6. sets
El comando sets establece el valor de una señal.
Sintaxis y un ejemplo:
sets <nombre-señal> <valor>
net mysignal and2.0.in0 pyvcp.my-led
sets mysignal 1Es un error si:
-
El nombre de la señal no existe
-
La señal ya tiene un escritor
-
El valor no es el tipo correcto para la señal
1.7. unlinkp
El comando unlinkp desvincula un pin de la señal conectada. Si no se conectó el pin a una señal antes de ejecutar el comando, no sucede nada. No es necesario el nombre de la señal; el pin quedara aislado de cualquier señal. El comando unlinkp es útil para la resolución de problemas.
Sintaxis y ejemplo:
unlinkp <nombre-pin>
unlinkp parport.0.pin-02-out1.8. Comandos obsoletos
Los siguientes comandos están desaconsejados y pueden eliminarse en futuras versiones. Cualquier nueva configuración debe usar el comando net. Estos comandos están incluidos para que las configuraciones más antiguas sigan funcionando.
El comando linksp crea una conexión entre una señal y un pin.
Sintaxis y un ejemplo:
linksp <nombre-señal> <nombre-pin>
linksp X-step parport.0.pin-02-outEl comando net ha reemplazado al comando linksp.
El comando linkps crea una conexión entre un pin y una señal. Es lo mismo que linksp pero los argumentos están invertidos.
Sintaxis y un ejemplo:
linkps <nombre-pin> <nombre-señal>
linkps parport.0.pin-02-out X-StepEl comando net ha reemplazado el comando linkps.
el comando newsig crea una nueva señal HAL con el nombre <signame> y el tipo de datos <tipo>. El tipo debe ser bit, s32, u32 o float. Es un error si signame ya existe.
Sintaxis y un ejemplo:
newsig <signame> <tipo>
newsig Xstep bitSe puede encontrar más información en el manual de HAL o en las páginas man de halrun.
2. Datos HAL
2.1. Bit
Un valor de bit puede estar activado o desactivado.
-
valores de bit = true o 1 y false o 0 (True, TRUE, true, son todos válidos)
2.2. Float
Un "float" es un número de punto flotante. En otras palabras, el punto decimal puede moverse según sea necesario.
-
valores de float = un valor de punto flotante de 64 bits, con aproximadamente 53 bits de resolución y más de 1000 bits de rango dinámico.
Para obtener más información sobre los números de punto flotante, consulte:
2.3. s32
Un número s32 es un número entero que puede tener un valor negativo o positivo.
-
valores de s32 = números enteros de -2147483648 a 2147483647
2.4. u32
Un número u32 es un número entero que es positivo solamente.
-
valores u32 = números enteros de 0 a 4294967295
3. Archivos HAL
Si utilizó el Asistente de configuración de Steppers para generar su configuración, tendrá hasta tres archivos HAL en su directorio de configuración.
-
mi-mill.hal (si ha llamado a su configuración mi-mill) Este archivo será cargado el primero y no debe cambiarse si usó el Asistente de configuración de Stepper.
-
custom.hal Este archivo se carga a continuación y antes de que se cargue la GUI. En él se ponen los comandos HAL personalizados que se quieren cargar antes de que sea cargada la GUI.
-
custom_postgui.hal Este archivo se carga después de que se cargue la GUI. Es donde se colocan los comandos HAL personalizados que desea cargar después de la carga de la GUI. Cualquier comando HAL que use widgets pyVCP debe ser colocado aquí.
4. Componentes HAL
A cada componente HAL, cuando es creado, se le agregan automáticamente dos parámetros. Estos parámetros permiten monitorizar el tiempo de ejecución de un componente.
.time
.tmax
time es la cantidad de ciclos de CPU necesarios para ejecutar la función.
tmax es la cantidad máxima de ciclos de CPU necesarios para ejecutar la función. tmax es un parámetro de lectura/escritura para que el usuario pueda configurarlo a 0 para deshacerse de la primera inicialización en la ejecución de la función.
5. Componentes lógicos
HAL contiene varios componentes lógicos en tiempo real. Un componentes lógico sigue una tabla de verdad que indica cuál es el resultado para cualquier entrada dada. Normalmente, son manipuladores de bits y siguen la lógica eléctrica de tablas de verdad de puertas lógicas.
5.1. and2
El componente and2 es una puerta and de dos entradas. La tabla de verdad que sigue muestra el resultado en función de cada combinación de entrada.
Sintaxis
and2 [count=N] | [nombres=nombre1[, nombre2 ...]]Funciones
and2.nPines
and2.N.in0 (bit, in)
and2.N.in1 (bit, in)
and2.N.out (bit, out)Tabla de verdad
| in0 | in1 | out |
|---|---|---|
False |
False |
False |
True |
False |
False |
False |
True |
False |
True |
True |
True |
5.2. not
El componente not es un inversor.
Sintaxis
not [count=n] | [nombres=nombre1[,nombre2...]]Funciones
not.all
not.nPines
not.n.in (bit, in)
not.n.out (bit, out)Tabla de verdad
| in | out |
|---|---|
True |
False |
False |
True |
5.3. or2
El componente or2 es una puerta OR de dos entradas.
Sintaxis
or2 [count=n] | [nombres=nombre1[,nombre2...]]Funciones
or2.n
Pines
or2.n.in0 (bit, in)
or2.n.in1 (bit, in)
or2.n.out (bit, out)Tabla de verdad
| in0 | in1 | out |
|---|---|---|
True |
False |
True |
True |
True |
True |
False |
True |
True |
False |
False |
False |
5.4. xor2
El componente xor2 es una puerta XOR de dos entradas (O exclusivo).
Sintaxis
xor2 [count=n] | [nombres=nombre1[,nombre2...]]Funciones
xor2.nPines
xor2.n.in0 (bit, in)
xor2.n.in1 (bit, in)
xor2.n.out (bit, out)Tabla de verdad
| in0 | in1 | out |
|---|---|---|
True |
False |
True |
True |
True |
False |
False |
True |
True |
False |
False |
False |
5.5. Ejemplos de lógica
Ejemplo and2 que conecta dos entradas a una salida.
loadrt and2 count=1
addf and2.0 servo-thread
net my-sigin1 and2.0.in0 <= parport.0.pin-11-in
net my-sigin2 and2.0.in1 <= parport.0.pin-12-in
net both-on parport.0.pin-14-out <= and2.0.outEn el ejemplo anterior, se carga una sola copia (count=1) de and2 en el espacio de tiempo real y se agrega (addf) al hilo servo. Despues, el pin 11 del puerto paralelo es conectado al bit 0 de la puerta and2.0 y el pin 12 se conecta al bit 1 de la puerta and2.0. Por último, se conecta el bit de salida del componente (and2.0.out) al pin 14 del puerto paralelo. Para ello se crea y usa la señal both-on. Entonces, siguiendo la tabla de verdad para and2, si el pin 11 y el pin 12 están encendidos, el pin de salida 14 estará encendido.
6. Componentes de conversión
6.1. weighted_sum
weighted_sum convierte un grupo de bits en un entero. La conversión es la suma de los "pesos" de los bits que valen 1, mas cualquier offset. El peso del bit m-ésimo es 2^m. Esto es similar a un binario codificado en decimal pero con más opciones. El bit hold (retención) detiene el procesamiento; si la entrada cambia, la suma no cambia.
La siguiente sintaxis se usa para cargar el componente weighted_sum.
loadrt weighted_sum wsum_sizes=tamaño[,tamaño,...]Crea grupos de suma ponderada, cada uno con la cantidad dada de bits de entrada (size).
Para actualizar weighted_sum se necesita adjuntar la funcion process_wsums a un hilo.
addf process_wsums servo-threadEsta funcion actualiza el componente weighted_sum.
En el siguiente ejemplo, recortado de la ventana HAL Configuration en Axis, Los bits 0 y 2 son verdaderos y no hay offset. El peso del bit 0 es 1 y el peso del bit 2 es 4, por lo que la suma es 5.
Component Pins:
Owner Type Dir Value Name
10 bit In TRUE wsum.0.bit.0.in
10 s32 I/O 1 wsum.0.bit.0.weight
10 bit In FALSE wsum.0.bit.1.in
10 s32 I/O 2 wsum.0.bit.1.weight
10 bit In TRUE wsum.0.bit.2.in
10 s32 I/O 4 wsum.0.bit.2.weight
10 bit In FALSE wsum.0.bit.3.in
10 s32 I/O 8 wsum.0.bit.3.weight
10 bit In FALSE wsum.0.hold
10 s32 I/O 0 wsum.0.offset
10 s32 Out 5 wsum.0.sum