1. Commandes de Hal
Des informations plus détaillées peuvent être trouvées dans la man page en tapant man halcmd dans une console. Pour voir la configuration de HAL ainsi que le statut de ses pins et paramètres utiliser la fenêtre HAL Configuration dans le menu Machine d’AXIS. Pour visualiser le statut des pins, ouvrir l’onglet Watch puis cliquer dans l’arborescence sur les pins qui doivent être visualisées dans la fenêtre watch.
1.1. loadrt
La commande loadrt charge un composant temps réel de HAL. Les composants temps réel doivent être ajoutés au thread temps réel pour être fonctionnels. Il n’est pas possible de charger un composant de l’espace utilisateur dans l’espace temps réel.
Syntaxe et exemple:
loadrt <component> <options> loadrt mux4 count=1
1.2. addf
La commande addf ajoute une fonction à un thread temps réel. Si l’assistant StepConf a été utilisé pour créer la configuration, deux threads ont été créés.
-
base-thread (le thread haute vitesse) ce thread prends en main les items nécessitant une réponse très rapide comme la génération d’impulsions, la lecture et l'écriture sur le port parallèle.
-
servo-thread (le thread basse vitesse) ce thread prends en main les items n'étant pas influencés par la vitesse comme le contrôleur de mouvement, l’API Classic Ladder et les commandes manuelles.
Syntaxe et exemple:
addf <component> <thread> addf mux4 servo-thread
1.3. loadusr
La commande loadusr charge un composant de HAL de l’espace utilisateur. Les programmes de l’espace utilisateur ont leur propre processus séparé qui optionnellement communique avec les autres composants de HAL via leurs pins et paramètres. Il n’est pas possible de charger un composant temps réel dans l’espace utilisateur.
Les drapeaux peuvent être un ou plusieurs parmi les suivants:
- -W
-
pour attendre que le composant soit prêt. Le composant est supposé avoir le même nom que le premier argument de la commande.
- -Wn <nom>
-
pour attendre un composant, qui porte le nom donné sous la forme <nom>.
- -w
-
pour attendre la fin du programme
- -i
-
pour ignorer la valeur retournée par le programme (avec -w)
Syntaxe et exemple:
loadusr <component> <options> loadusr halui loadusr -Wn spindle gs2_vfd -n spindle
En anglais ça donne loadusr wait for name spindle component gs2_vfd name spindle. Le -n spindle est une partie du composant gs2_vfd et non de la commande loadusr.
1.4. net
La commande net crée une connexion entre un signal et une ou plusieurs pins. Si le signal n’existe pas, net le crée. Les flèches de direction <=, => et <=> sont seulement là pour aider à la lecture de la logique, ils ne sont pas utilisés par la commande net. Un espace doit séparer les flèches de direction des noms de pin.
net signal-name pin-name <direction optionnelle> (<second pin-name optionnel>) net home-x axis.0.home-sw-in <= parport.0.pin-11-in
Dans l’exemple ci-dessus, home-x est le nom du signal, axis.0.home-sw-in est une pin de direction IN, <= est une flèche de direction optionnelle et parport.0.pin-11-in est une pin de direction OUT. Cela peut paraître déroutant mais les labels in et out, pour une broche de port parallèle, indiquent la direction physique dans laquelle travaille la broche et non comment elle est traitée dans HAL.
Une pin peut être connectée à un signal si elle obéit aux règles suivantes:
-
Une pin IN peut toujours être connectée à un signal.
-
Une pin IO peut être connectée à moins qu’une pin OUT soit présente sur le signal.
-
Une pin OUT peut être connectée seulement si il n’y a pas d’autre pin OUT ou IO sur le signal.
Le même signal-name peut être utilisé dans de multiples commandes net pour connecter des pins additionnelles, tant que les règles précédentes sont observées.
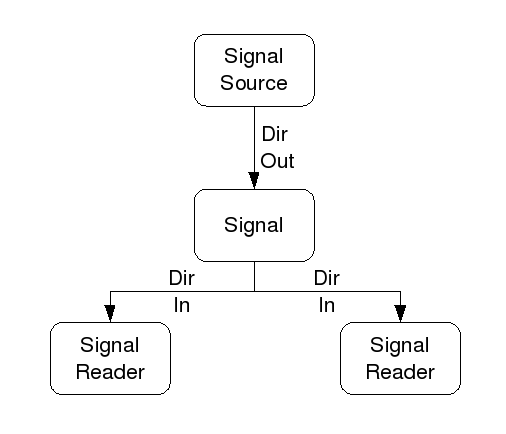
Voici un exemple qui montre le signal xStep avec la source qui est stepgen.0.out et avec deux lecteurs, parport.0.pin-02-out etparport.0.pin-08-out. Simplement la valeur de stepgen.0.out est envoyée au signal xStep et cette valeur est alors envoyée sur parport.0.pin-02-out.
# signal source destination net xStep stepgen.0out => parport.0.pin-02-out
Puisque le signal xStep contient la valeur de stepgen.0.out (la source) il est possible de ré-utiliser le même signal pour envoyer la valeur à d’autres lecteurs, utiliser simplement le signal avec les autres lecteurs sur de nouvelles lignes:
# signal destination2 net xStep => parport.0.pin-08-out
Ce qui peut également s'écrire en une seule ligne:
# signal source destination1 destination2 net xStep stepgen.0.out => parport.0.pin-02-out parport.0.pin-08-out
Les pins appelées I/O pins comme index-enable, ne suivent pas cette règle.
1.5. setp
La commande setp ajuste la valeur d’une pin ou d’un paramètre. Les valeurs valides dépendront du type de la pin ou du paramètre.
C’est une erreur si les types de donnée ne correspondent pas.
Certains composants ont des paramètres qui doivent être positionnés avant utilisation. Il n’est pas possible d’utiliser setp sur une pin connectée à un signal.
Syntaxe et exemple:
setp <pin/parameter-name> <value> setp parport.0.pin-08-out TRUE
1.6. sets
La commande sets positionne la valeur d’un signal.
Syntaxe et exemple:
sets <signal-name> <value> net mysignal and2.0.in0 pyvcp.my-led sets mysignal 1
C’est une erreur si:
-
Le nom de signal n’existe pas
-
Le signal à déjà été écrit
-
La valeur n’est pas du type correct pour le signal
1.7. unlinkp
La commande unlinkp déconnecte la pin du signal auquel elle est connectée. Si aucun signal n’a été connecté à la pin avant de lancer cette commande, rien ne se passe.
Syntaxe et exemple:
unlinkp <pin-name> unlinkp parport.0.pin-02-out
1.8. Commandes obsolètes
Les commandes suivantes sont dépréciées et seront retirées dans les futures versions. Toute nouvelle configuration doit utiliser la commande net.
1.9. linksp
La commande linksp a été remplacée par la commande net.
La commande linksp créait une connexion entre un signal et une pin.
Syntaxe et exemple:
linksp <signal-name> <pin-name> linksp X-step parport.0.pin-02-out
1.10. linkps
La commande linkps a été remplacée par la commande net.
La commande linksp créait une connexion entre une pin et un signal. C’est la même chose que linksp mais les arguments sont inversés.
Syntaxe et exemple:
linkps <pin-name> <signal-name> linkps parport.0.pin-02-out X-Step
1.11. newsig
the command newsig creates a new HAL signal by the name <signame> and the data type of <type>. Type must be bit, s32, u32 or float. Error if <signame> already exists.
Syntaxe et exemple:
newsig <signame> <type> newsig Xstep bit
D’autres informations peuvent être trouvées dans le manuel de HAL ou la man page de halrun.
2. HAL Data
[NDT la description des données de HAL reste en Anglais, elle sont
suffisamment simples pour être comprises.]
2.1. Bit
A bit value is an on or off.
-
bit values = true or 1 and false or 0 (True, TRUE, true are all valid)
2.2. Float
A float is a floating point number. In other words the decimal point can move as needed.
-
float values = a 64 bit floating point value, with approximately 53 bits of resolution and over 1000 bits of dynamic range.
For more information on floating point numbers see:
2.3. s32
An s32 number is a whole number that can have a negative or positive value.
-
s32 values = integer numbers -2147483648 to 2147483647
2.4. u32
A u32 number is a whole number that is positive only.
-
u32 values = integer numbers 0 to 4294967295
3. Fichiers Hal
Si l’assistant StepConf a été utilisé pour générer la configuration trois fichiers HAL ont dû être créés dans le répertoire de la configuration.
-
ma-fraiseuse.hal (si ne nom de la config est "ma-fraiseuse") Ce fichier est chargé en premier, il ne doit pas être modifié sous peine de ne plus pouvoir l’utiliser avec l’assistant StepConf.
-
custom.hal Ce fichier est le deuxième à être chargé et il l’est avant l’interface utilisateur graphique (GUI). C’est dans ce fichier que ce trouvent les commandes personnalisées de l’utilisateur devant être chargées avant la GUI.
-
custom_postgui.hal Ce fichier est chargé après la GUI. C’est dans ce fichier que se trouvent les commandes personnalisées de l’utilisateur devant être chargées après la GUI. Toutes les commandes relatives aux widgets de pyVCP doivent être placées ici.
4. Composants de HAL
Deux paramètres sont automatiquement ajoutés à chaque composants HAL quand il est créé. Ces paramètres permettent d’encadrer le temps d’exécution d’un composant.
.time
.tmax
time est le nombre de cycles du CPU qu’il a fallu pour exécuter la fonction.
tmax est le nombre maximum de cycles du CPU qu’il a fallu pour exécuter la fonction. tmax est un paramètre en lecture/écriture, de sorte que l’utilisateur peut le mettre à 0 pour se débarrasser du premier temps d’initialisation de la fonction.
5. Composants de logiques combinatoire
Hal contient plusieurs composants logiques temps réel. Les composants logiques suivent une tables de vérité montrant les états logiques des sorties en fonction de l'état des entrées. Typiquement, la manipulation des bits d’entrée détermine l'état électrique des sorties selon la table de vérité des portes.
5.1. and2
Le composant and2 est une porte and à deux entrées. Sa table de vérité montre la sortie pour chaque combinaison des entrées.
Syntaxe
and2 [count=N] or [names=name1[,name2...]]
Fonctions
and2.n
Pins
and2.N.in0 (bit, in) and2.N.in1 (bit, in) and2.N.out (bit, out)
Table de vérité
| in0 | in1 | out |
|---|---|---|
False |
False |
False |
True |
False |
False |
False |
True |
False |
True |
True |
True |
5.2. not
Le composant not est un simple inverseur d'état.
Syntaxe
not [count=n] or [names=name1[,name2...]]
Fonctions
not.all not.n
Pins
not.n.in (bit, in) not.n.out (bit, out)
Table de vérité
| in | out |
|---|---|
True |
False |
False |
True |
5.3. or2
Le composant or2 est une porte OR à deux entrées.
Syntaxe
or2[count=n] or [names=name1[,name2...]]
Functions
or2.n
Pins
or2.n.in0 (bit, in) or2.n.in1 (bit, in) or2.n.out (bit, out)
Table de vérité
| in0 | in1 | out |
|---|---|---|
True |
False |
True |
True |
True |
True |
False |
True |
True |
False |
False |
False |
5.4. xor2
Le composant xor2 est une porte XOR à deux entrées (OU exclusif).
Syntaxe
xor2[count=n] or [names=name1[,name2...]]
Fonctions
xor2.n
Pins
xor2.n.in0 (bit, in) xor2.n.in1 (bit, in) xor2.n.out (bit, out)
Table de vérité
| in0 | in1 | out |
|---|---|---|
True |
False |
True |
True |
True |
False |
False |
True |
True |
False |
False |
False |
5.5. Exemples en logique combinatoire
Un exemple de connexion avec un "and2", deux entrées vers une sortie.
loadrt and2 count=1 addf and2.0 servo-thread net my-sigin1 and2.0.in0 <= parport.0.pin-11-in net my-sigin2 and2.0.in1 <= parport.0.pin-12-in net both-on parport.0.pin-14-out <= and2.0.out
Dans cet exemple un and2 est chargé dans l’espace temps réel, puis ajouté à servo thread. Ensuite la broche d’entrée 11 du port parallèle est connectée à l’entrée in0 de la porte. Puis la broche d’entrée 12 du port est connectée à l’entrée in1 de la porte. Enfin la sortie and2.0.out de la porte est connectée à la broche de sortie 14 du port parallèle. Ainsi en suivant la table de vérité du and2, si les broches 11 et 12 du port sont à 1, alors sa sortie 14 est à 1 aussi.
6. Composants de conversion
6.1. Somme pondérée (weighted_sum)
La somme pondérée converti un groupe de bits en un entier. La conversion est la somme des poids des bits présents plus n’importe quel offset. C’est similaire au binaire codé décimal mais avec plus d’options. Le bit hold interrompt le traitement des entrées, de sorte que la valeur sum ne change plus.
La syntaxe suivante est utilisée pour charger le composant weighted_sum.
loadrt weighted_sum wsum_sizes=size[,size,...]
Crée des groupes de weighted_sum, chacun avec le nombre donné de bits d’entrée (size).
Pour mettre à jour la weighted_sum, le process_wsums doit être attaché à un thread.
addf process_wsums servo-thread
Ce qui met à jour le composant weighted_sum.
Dans l’exemple suivant, une copie de la fenêtre de configuration de HAL d’Axis, les bits 0 et 2 sont TRUE, ils n’ont pas d’offset. Le poids (weight) du bit 0 est 1, celui du bit 2 est 4, la somme est donc 5.
Component Pins:
Owner Type Dir Value Name
10 bit In TRUE wsum.0.bit.0.in
10 s32 I/O 1 wsum.0.bit.0.weight
10 bit In FALSE wsum.0.bit.1.in
10 s32 I/O 2 wsum.0.bit.1.weight
10 bit In TRUE wsum.0.bit.2.in
10 s32 I/O 4 wsum.0.bit.2.weight
10 bit In FALSE wsum.0.bit.3.in
10 s32 I/O 8 wsum.0.bit.3.weight
10 bit In FALSE wsum.0.hold
10 s32 I/O 0 wsum.0.offset
10 s32 Out 5 wsum.0.sum