
Vismach is a set of Python functions that can be used to create and animate models of machines.
In diesem Kapitel geht es um die in Qt eingebettete Version von Vismach, siehe auch: https://sa-cnc.com/linuxcnc-vismach/ .
1. Einführung
Vismach zeigt das Modell in einem 3D-Ansichtsfenster (engl. viewport) an und die Modellteile werden animiert, wenn sich die Werte der zugehörigen HAL-Pins ändern.
Das Vismach 3D Ansichtsfenster (engl. viewport view) kann wie folgt manipuliert werden:
-
zoom by scroll wheel
-
pan by middle button drag
-
rotate by right-button drag
-
tilt by left button drag
Ein Vismach-Modell hat die Form eines Python-Skripts und kann die Standard-Python-Syntax verwenden.
Das bedeutet, dass es mehr als eine Möglichkeit gibt, das Skript zu gestalten, aber in den Beispielen in diesem Dokument wird die einfachste und grundlegendste davon verwendet.
Die grundlegende Reihenfolge bei der Erstellung des Vismach-Modells ist:
-
Erstellen der Teile
-
Definieren, wie sie sich bewegen
-
In Bewegungsgruppen zusammenstellen
2. Hierarchie des Maschinendesigns
Das Modell folgt einer logischen Baumstruktur.
Stellen Sie sich einen Baum vor, mit Wurzel/Stamm, Ästen und kleineren Zweigen. Wenn Sie den größeren Ast bewegen, dann bewegen sich die kleineren Äste mit, aber wenn Sie den kleineren Ast bewegen, so bewegen sich die größeren dennoch nicht.
Das Maschinendesign folgt diesem konzeptionellen Design.
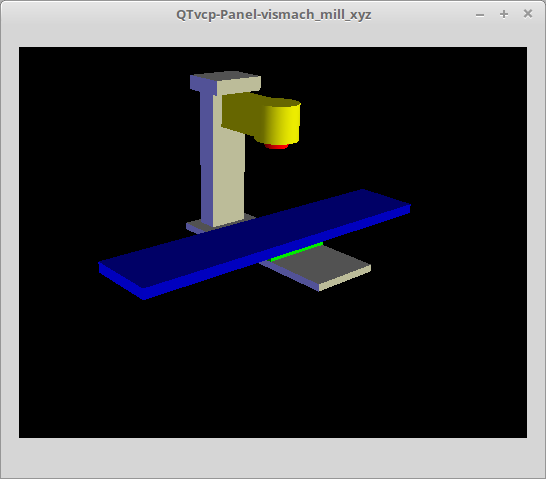
Nehmen wir als Beispiel die Fräse, die im obigen Bild des 3D-Ansichtsfensters zu sehen ist:
-
Wenn Sie X bewegen, kann sie sich von selbst bewegen,
-
aber wenn Sie die Baugruppe Y verschieben, wird auch die Baugruppe X verschoben, da sie mit der Baugruppe Y verbunden ist.
Für diese Maschine sieht der Baum so aus:
model
|
|---frame
| |
| |---base
| |
| |---column
| |
| |---top
|
|---yassembly
| |
| |---xassembly
| | |
| | |---xbase
| | |
| | |---work
| |
| |---ybase
|
|---zassembly
|
|---zframe
| |
| |---zbody
| |
| |---spindle
|
|---toolassembly
|
|---cat30
|
|---tool
|
|---tooltip
|
|---(tool cylinder function)
Wie Sie sehen, muss das niedrigste Teil zuerst existieren, bevor es mit anderen zu einer Baugruppe zusammengefasst werden kann. Sie bauen also vom niedrigsten Punkt im Baum aufwärts und fügen sie zusammen.
Dasselbe gilt für jede Art von Maschinenkonstruktion: Schauen Sie sich das Beispiel des Maschinenarms an, und Sie werden sehen, dass er mit der Spitze beginnt und sich zum größeren Teil des Arms hinzugesellt, um sich schließlich mit der Basis zu vereinen.
3. Starten des Skripts
Zum Testen ist es nützlich, die Shebang-Zeile #!/usr/bin/env python3 einzufügen, damit die Datei direkt von der Kommandozeile ausgeführt werden kann.
Zunächst sind die erforderlichen Bibliotheken zu importieren.
#!/usr/bin/env python3
import hal
import math
import sys
from qtvcp.lib.qt_vismach.qt_vismach import *4. HAL-Pins.
Ursprünglich erforderte die Vismach-Bibliothek die Erstellung einer Komponente und den Anschluss von HAL-Pins zur Steuerung der Simulation.
qt_vismach kann die HAL-Systempins direkt lesen oder, wenn Sie es wünschen, separate HAL-Pins verwenden, die Sie in einer HAL-Komponente definieren müssen:
c = hal.component("samplegui")
c.newpin("joint0", hal.HAL_FLOAT, hal.HAL_IN)
c.newpin("joint1", hal.HAL_FLOAT, hal.HAL_IN)
c.ready()Sie können zwischen den beiden Optionen in den Funktionen wählen, die diese Einträge verwenden:
hal_comp-
Die HAL Komponenten Objekt oder None.
In QtVCP, wenn Sie System-Pins direkt lesen, wird das Komponentenargument aufNonegesetzt. hal_pin-
Der Name des BIT HAL IN-Pins, der die Farbe ändern wird.
Wennhal_compaufNonegesetzt ist, dann muss dies der vollständige Name eines System-Pins sein, andernfalls ist dies der Pin-Name ohne den Komponentennamen.
5. Erstellen von Teilen
5.1. Importieren von STL- oder OBJ-Dateien
Das ist wahrscheinlich am einfachsten:
-
Herstellung einer Geometrie in einem CAD-Paket_
-
_Import in das Modellskript unter Verwendung der Funktionen "ASCIISTL()" oder "ASCIIOBJ()".
Beide Funktionen können eines von zwei benannten Argumenten annehmen, entweder einen Dateinamen oder Daten:
part = AsciiSTL(filename="path/to/file.stl")
part = AsciiSTL(data="solid part1 facet normal ...")
part = AsciiOBJ(filename="path/to/file.obj")
part = AsciiOBJ(data="v 0.123 0.234 0.345 1.0 ...")-
STL-Modellteile werden dem Vismach-Raum an denselben Stellen hinzugefügt, an denen sie im STL- oder OBJ-Raum erstellt wurden, d. h. idealerweise mit einem Rotationspunkt an ihrem Ursprung.
|
Note
|
Es ist viel einfacher, sich während des Bauens zu bewegen, wenn der Ursprung des Modells an einem Drehpunkt liegt. |
5.2. Aufbau aus geometrischen Primitiven
Alternativ können Teile auch im Modellskript aus einer Reihe von Formprimitiven erstellt werden.
assembly = collction([part1,part2,part3])-
Collection ist ein allgemeiner Container von miteinander in Beziehung stehenden (endl. related)Teilen (engl. parts)
Viele Formen werden am Ursprung erstellt und müssen nach der Erstellung an den gewünschten Ort verschoben werden.
cylinder = CylinderX(x1, r1, x2, r2)cylinder = CylinderY(y1, r1, y2, r2)cylinder = CylinderZ(z1, r1, z2, r2)-
Erzeugt einen (optional verjüngten) Zylinder auf der gegebenen Achse mit den gegebenen Radien an den gegebenen Punkten auf der Achse.
sphere = Sphere(x, y, z, r)-
Erzeugt eine Kugel mit Radius r bei (x,y,z).
triangle = TriangleXY(x1, y1, x2, y2, x3, y3, z1, z2)triangle = TriangleXZ(x1, z1, x2, z2, x3, z3, y1, y2)triangle = TriangleYZ(y1, z1, y2, z2, y3, z3, x1, x2)-
Erzeugt eine dreieckige Platte zwischen Ebenen, die durch die letzten beiden Werte parallel zur angegebenen Ebene definiert ist und deren Eckpunkte durch die drei Koordinatenpaare gegeben sind.
arc = ArcX(x1, x2, r1, r2, a1, a2)-
Erstellen Sie eine Bogenform.
box = Box(x1, y1, z1, x2, y2, z2)-
Erzeugt ein rechteckiges Prisma mit gegenüberliegenden Ecken an den angegebenen Positionen und Kanten parallel zu den XYZ-Achsen.
box = BoxCentered(xw, yw, zw)-
Erzeugt eine xw mal yw mal zw Box, die auf den Ursprung zentriert ist.
box = BoxCenteredXY(xw, yw, z)-
Erstellt einen Kastenboden auf der WY-Ebene mit der Breite xw / yw und der Höhe z.
Zusammengesetzte Teile können durch Zusammenfügen dieser Primitive entweder zum Zeitpunkt der Erstellung oder später erstellt werden:
part1 = Collection([Sphere(100,100,100,50), CylinderX(100,40,150,30)])
part2 = Box(50,40,75,100,75,100)
part3 = Collection([part2, TriangleXY(10,10,20,10,15,20,100,101)])
part4 = Collection([part1, part2])6. Bewegliche Teile des Modells
Möglicherweise müssen Teile im Vismach-Raum verschoben werden, um das Modell zusammenzusetzen. Der Ursprung bewegt sich nicht - Translate() und Rotate() verschieben die Collection, während Sie Teile hinzufügen, relativ zu einem stationären Ursprung.
6.1. Verschieben von Teilen des Modells
part1 = Translate([part1], x, y, z)-
Verschiebe Teil1 um die angegebenen Abstände in x, y und z.
6.2. Rotation von Teilen des Modells
part1 = Rotate([part1], theta, x, y, z)-
Drehen Sie das Teil um den Winkel theta [Grad] um eine Achse zwischen dem Ursprung und x, y, z.
7. Animieren von Teilen
Zur Animation des Modells durch die Werte der HAL-Pins gibt es vier Funktionen HalTranslate, HalRotate, HalToolCylinder und HalToolTriangle.
Damit sich Teile innerhalb einer Baugruppe bewegen können, müssen ihre HAL-Bewegungen definiert werden, bevor sie mit dem Befehl "Collection" zusammengebaut werden.
Die Rotationsachse und der Translationsvektor bewegen sich mit dem Teil:
-
wie es vom Vismach-Skript während der Modellmontage verschoben wird, oder
-
während es sich als Reaktion auf die HAL-Pins bewegt, während das Modell animiert wird.
7.1. HalTranslate
part = HalTranslate([part], hal_comp, hal_pin, xs, ys, zs)-
part-
Eine Sammlung oder ein Teil.
Sie kann zu einem früheren Zeitpunkt im Skript erstellt werden oder, falls gewünscht, an dieser Stelle, z. B.`part1 = HalTranslate([Box(....)], ...)`. + hal_comp-
Die HAL Komponente ist das nächste Argument.
In QtVCP, wenn Sie System-Pins direkt lesen, wird das Komponentenargument aufNonegesetzt. hal_pin-
Der Name des HAL-Pins, der die Bewegung animieren soll.
Dieser muss mit einem bestehenden HAL-Pin übereinstimmen, der die Gelenkposition beschreibt, wie z. B.:"joint.2.pos-fb"Andernfalls würde die Komponenteninstanz und der Pin-Name dieser Komponente angegeben werden.
xs, ys, zs-
Die X, Y, Z Skalen.
Bei einer kartesischen Maschine, die im Maßstab 1:1 erstellt wurde, wäre dies normalerweise "1,0,0" für eine Bewegung in positiver X-Richtung.
Wenn die STL-Datei jedoch in cm und die Maschine in Zoll erstellt wurde, kann dies an dieser Stelle durch die Verwendung von 0,3937 ( = 1 cm/1 Zoll = 1 cm /2,54 cm ) als Maßstab festgelegt werden.
7.2. HalRotate
part = HalRotate([part], hal_comp, hal_pin, angle_scale, x, y, z)-
Dieser Befehl funktioniert ähnlich wie
HalTranslate, mit dem Unterschied, dass es normalerweise notwendig ist, das Teil zuerst zum Ursprung zu bewegen, um die Achse zu definieren.x, y, z-
Definiert die Drehachse vom Ursprung, dem Koordinatenpunkt (x,y,z).
Wenn das Teil vom Ursprung zurück an seine richtige Position bewegt wird, kann die Drehachse als im Teil "eingebettet" betrachtet werden. angle_scale-
Drehwinkel werden in Grad angegeben. Für ein Drehgelenk mit einer Skalierung von 0-1 müssten Sie also eine Winkelskala von 360 verwenden.
7.3. HalToolCylinder
tool = HalToolCylinder()-
Stellen Sie einen Zylinder her, der ein zylindrisches Fräswerkzeug darstellt, basierend auf dem Werkzeugtisch und dem aktuell belasteten Werkzeug.
tool = HalToolCylinder()
toolshape = Color([1, .5, .5, .5],[tool])
# oder kompakter:
toolshape = Color([1, .5, .5, .5], [HalToolCylinder()])7.4. HalToolTriangle
tool = HalToolTriangle()-
Erstellen Sie ein Dreieck, um ein dreieckiges Drehwerkzeug darzustellen, basierend auf dem Werkzeugtisch und dem aktuell geladenen Werkzeug.
tool = HalToolTriangle()
toolshape = Color([1, 1, 0, 1],[tool])
# oder kompakter:
toolshape = Color([1, 1, 0, 1],[HalToolTriangle()])7.5. HAL einstellbare Grundelemente (engl. Primitives)
Alle Form-Grundelemente (engl. shape primitives) können HAL-Pin-Namen anstelle von Koordinaten verwenden.
Entweder indem das Komponentenobjekt als erste Variable hinzugefügt und der pinname-String für eine Koordinate eingesetzt wird, oder
indem der vollständige Komponenten-/Pinname-String für eine Koordinate eingesetzt wird.
Erzeugt ein rechteckiges Prisma mit gegenüberliegenden Ecken an den angegebenen Positionen und Kanten parallel zu den XYZ-Achsen.
Die Z Start-Koordinate wird kontrolliert durch den HAL-Pin Zstart.
box = Box(component, x1, y1, 'Zstart', x2, y2, z2)
box = Box(x1, y1, 'componentName.Zstart', x2, y2, z2)8. Zusammenbau des Modells
Damit sich die Teile gemeinsam bewegen können, müssen sie mit dem Befehl Collection() zusammengefügt werden.
Es ist wichtig, die Teile zusammenzufügen und ihre Bewegungen in der richtigen Reihenfolge zu definieren.
Um beispielsweise eine Fräsmaschine mit beweglichem Kopf, einer rotierenden Spindel und einer animierten Zugstange zu erstellen, würden Sie dies tun:
-
Erstellen Sie den Hauptteil des Kopfes.
-
Erstellen Sie die Spindel im Ursprung.
-
Definieren Sie die Drehung.
-
Bewegen Sie den Kopf zur Spindel oder die Spindel zum Kopf.
-
Erstellen Sie die Zugstange (engl. draw bar).
-
Definieren Sie die Bewegung der Zugstange.
-
Bauen Sie die drei Teile zu einer Kopfeinheit zusammen.
-
Definieren Sie die Bewegung der Kopfeinheit.
In diesem Beispiel wird die Spindeldrehung durch die Drehung eines Satzes von Mitnehmern angezeigt:
#Drive dogs
dogs = Box(-6,-3,94,6,3,100)
dogs = Color([1,1,1,1],[dogs])
dogs = HalRotate([dogs],c,"spindle",360,0,0,1)
dogs = Translate([dogs],-1,49,0)
#Drawbar
draw = CylinderZ(120,3,125,3)
draw = Color([1,0,.5,1],[draw])
draw = Translate([draw],-1,49,0)
draw = HalTranslate([draw],c,"drawbar",0,0,1)
# head/spindle
head = AsciiSTL(filename="./head.stl")
head = Color([0.3,0.3,0.3,1],[head])
head = Translate([head],0,0,4)
head = Collection([head, tool, dogs, draw])
head = HalTranslate([head],c,"Z",0,0,0.1)
# base
base = AsciiSTL(filename="./base.stl")
base = Color([0.5,0.5,0.5,1],[base])
# mount head on it
base = Collection([head, base])Schließlich muss eine einzige Sammlung aller Maschinenteile, Böden und Arbeiten (falls vorhanden) erstellt werden.
Für eine serial machine wird jedes neue Teil der Sammlung des vorherigen Teils hinzugefügt.
Bei einer Parallelmaschine kann es mehrere "Basis"-Teile geben.
So wird zum Beispiel in scaragui.py link3 zu link2, link2 zu link1 und link1 zu link0 hinzugefügt, so dass das endgültige Modell wie folgt erstellt wird:
model = Collection([link0, floor, table])Ein VMC-Modell mit separaten Teilen, die sich auf dem Sockel bewegen, könnte hingegen haben
model = Collection([base, saddle, head, carousel])9. Weitere Funktionen
9.1. Farbe
Legt die Farbe für die Anzeige des Teils fest.
part = Color([_colorspec_], [_part_])-
Beachten Sie, dass im Gegensatz zu den anderen Funktionen, die Definition des Teils in diesem Fall an zweiter Stelle steht.
_colorspec_-
Drei (0-1.0) RGB-Werte und Deckkraft. [R,G,B,A]
Zum Beispiel [1,0,0,0.5] für ein Rot mit 50% Deckkraft.
9.2. HALColorFlip
Setzt die Anzeigefarbe des Teils in Abhängigkeit des designierten HAL bit Pin Zustands.
part = HALColorFlip([_colorspec_], [_colorspec_], [_part_], hal_comp, hal_pin)-
Beachten Sie, dass im Gegensatz zu den anderen Funktionen, die Definition des Teils in diesem Fall an zweiter Stelle steht.
_colorspec_-
Drei (0-1.0) RGB-Werte und Deckkraft.
Zum Beispiel [1.0,0,0.5] für ein Rot mit 50% Deckkraft. hal_comp-
Die HAL Komponenten Objekt oder None.
In QtVCP, wenn Sie System-Pins direkt lesen, wird das Komponentenargument aufNonegesetzt. hal_pin-
Der Name des BIT HAL IN-Pins, der die Farbe ändern wird.
Wennhal_compaufNonegesetzt ist, dann muss dies der vollständige Name eines System-Pins sein, andernfalls ist dies der Pin-Name ohne den Komponentennamen.
9.3. HALColorRGB
Setzt die Anzeigefarbe des Teils basierend auf einem angegebenen HAL-U32-Pin-Wert.
Die Farbe wird aus dem U32-Wert dekodiert. Jede Farbe ist ein Dezimalwert von 0–255 (hier in Hexadezimal dargestellt):
rot = 0xXXXXXXRR
grün = 0xXXXXGGXX
blau = 0xXXBBXXXX
kombiniert als 0xXXBBGGRR
part = HALColorRGB([_part_], hal_comp, hal_pin, alpha=1.0)-
hal_comp-
Die HAL Komponenten Objekt oder None.
In QtVCP, wenn Sie System-Pins direkt lesen, wird das Komponentenargument aufNonegesetzt. hal_pin-
Der Name des U32-HAL-Eingangspins, der die Farbe ändert.
Wennhal_compauf None gesetzt ist, muss dies der vollständige Name eines Systempins sein, andernfalls ist es der Pin-Name ohne den Komponentennamen. alpha=-
Setzt die Deckkraft. (0-1.0)
9.4. Heads-Up Anzeige (engl. display)
Erzeugt ein Heads-up-Display in der Vismach-GUI, um Elemente wie Achsenpositionen, Titel oder Meldungen anzuzeigen.
myhud = Hud()
myhud = Hud()
myhud.show("Mill_XYZ")`9.5. HAL Heads-Up Display
Eine erweiterte Version des Hud, mit der HAL-Pins angezeigt werden können:
myhud = HalHud()
myhud = HalHud()
myhud.display_on_right()
myhud.set_background_color(0,.1,.2,0)
myHud.set_text_color(1,1,1)
myhud.show_top("Mill_XYZ")
myhud.show_top("------------")
myhud.add_pin('axis-x: ',"{:10.4f}","axis.x.pos-cmd")
myhud.add_pin('axis-y: ',"{:10.4f}","axis.y.pos-cmd")
myhud.add_pin('axis-z: ',"{:10.4f}","axis.z.pos-cmd")
myhud.show("-------------")Einige der verfügbaren HalHUD Funktionen:
-
set_background_color(red, green, blue, alpha)
-
add_pin(text, format, pinname)
-
set_text_color(red, green, blue)
9.6. HideCollection
HideCollection ist ein Container, der einen HAL-Pin verwendet, um die Anzeige der enthaltenen Teile zu steuern. + Eine Logik hoch auf dem HAL-Pin verbirgt die enthaltenen Teile.
comp.newpin("hide-chuck", hal.HAL_BIT, hal.HAL_IN)
# <snip make a machine with an A axis chuck assembly>
chuckassembly = HideCollection([chuckassembly],comp,'hide-chuck')
# kann auch so genutzt werden
chuckassembly = HideCollection([chuckassembly],None,'myvismach.hide-chuck')9.7. Plot-Farbe basierend auf Bewegungstyp (engl. motion type)
Wenn Sie verschiedene Bewegungen (engl. motions) in unterschiedlichen Farben darstellen möchten, müssen Sie zusätzlichen Python-Code hinzufügen.
Fügen Sie dies am Anfang der Datei hinzu:
from qtvcp.core import Status
STATUS = Status()und dies zu der Window-Klasse:
STATUS.connect('motion-type-changed', lambda w, data: v.choosePlotColor(data))
# auskommentieren, um die feed Farbe zu ändern und alle Farben auf dem Terminal ausgegeben zu sehen
#v.setColorsAttribute('FEED',(0,1,0))
#print(v.colors)Du kannst Farben zu DEFAULT, FEED, TRAVERSE, ARC, PROBE, ROTARYINDEX, TOOLCHANGE setzen mit setColorsAttribute().
9.8. Capture
-
tooltip = Capture()
Man kann sich dies als ein unsichtbares Bauteil vorstellen, das am Werkzeugspitzpunkt angebracht werden muss, um Position und Orientierung des Werkzeugkoordinatensystems zu verfolgen. Tatsächlich handelt es sich um eine Transformationsmatrix, die während der Bewegung des Modells fortlaufend aktualisiert wird. -
work = Capture()
Entsprechend wie oben, jedoch am Arbeitstisch angebracht, um das Werkstückkoordinatensystem zu verfolgen.
9.9. main
Dies ist der Befehl, der alles in Gang setzt, die Anzeige erstellt usw., wenn er direkt aus Python aufgerufen wird.
Normalerweise wird diese Datei von QtVCP importiert und das window() Objekt wird instanziiert und in einen anderen Bildschirm eingebettet.
main(model, tooltip, work, size=10, hud=myhud, rotation_vectors=None, lat=0, lon=0)-
_model_-
Sollte eine Sammlung sein, die alle Maschinenteile enthält.
- tooltip und work
-
Muss durch
Capture()erzeugt werden, um den Backplot zu zeichnen, bei dem im Wesentlichen die Werkzeugspitzenposition im Werkstückkoordinatensystem dargestellt wird. Ein Beispiel dafür, wie die Werkzeugspitze mit einem Werkzeug und dieses mit dem Modell verbunden wird, findet sich inmill_xyz.py. _size_-
Legt die Ausdehnung des in der Ausgangsansicht dargestellten Volumens fest.
_hud_-
bezieht sich auf eine Head-up-Anzeige.
- "rotation_vectors" oder "lat, lon"
-
Kann verwendet werden, um den ursprünglichen Blickwinkel festzulegen. Es ist ratsam, zu tun, wie die Standard-Anfangsstandpunkt ist eher wenig hilfreich von unmittelbar über Kopf.
10. Hinweise
Erstellen Sie für Konstruktionszwecke eine Achsenursprungsmarkierung, um Teile relativ dazu sehen zu können. Sie können diese entfernen, wenn Sie fertig sind.
# Erstellen von Achsen-Ursprungs-Markierungen
X = CylinderX(-500,1,500,1)
X = Color([1, 0, 0, 1], [X])
Y = CylinderY(-500,1,500,1)
Y = Color([0, 1, 0, 1], [Y])
Z = CylinderZ(-500,1,500,1)
Z = Color([0, 0, 1, 1], [Z])
origin = Collection([X,Y,Z])Fügen Sie es der Window-Klassensammlung hinzu, damit es nie vom Ursprung verschoben wird.
v.model = Collection([origin, model, world])Beginnen Sie an der Schneidspitze (engl. cutting tip) und arbeiten Sie sich zurück. Fügen Sie jede Auflistung dem Modell am Ursprung hinzu, und führen Sie das Skript aus, um den Speicherort zu bestätigen. Drehen / Übersetzen und Ausführen des Skripts zur erneuten Bestätigung.
11. Grundstruktur eines QtVismach-Skripts
# imports
import hal
from qtvcp.lib.qt_vismach.qt_vismach import *
# import Status for motion type messages
from qtvcp.core import Status
STATUS = Status()
# hier HAL-Pins erstellen, falls erforderlich
#c = hal.component("samplegui")
#c.newpin("joint0", hal.HAL_FLOAT, hal.HAL_IN)
# Erstellen des Bodens, des Werkzeugs und des Werkstücks
floor = Box(-50, -50, -3, 50, 50, 0)
work = Capture()
tooltip = Capture()
# Das Modell aufbauen und zusammensetzen
part1 = Collection([Box(-6,-3,94,6,3,100)])
part1 = Color([1,1,1,1],[part1])
part1 = HalRotate([part1],None,"joint.0.pos-fb",360,0,0,1)
part1 = Translate([dogs],-1,49,0)
# ein Top-Level-Modell erstellen
model = Collection([base, saddle, head, carousel])
# wir wollen entweder in QtVCP einbetten oder direkt mit PyQt5 anzeigen
# also ein Fenster bauen, um das Modell anzuzeigen
class Window(QWidget):
def __init__(self):
super(Window, self).__init__()
self.glWidget = GLWidget()
v = self.glWidget
v.set_latitudelimits(-180, 180)
world = Capture()
# unkommentiert lassen, wenn es ein HUD gibt
# HUD muss wissen, wo es zeichnen soll
#v.hud = myhud
#v.hud.app = v
# update plot Farbe basierenden auf motion Typ
STATUS.connect('motion-type-changed', lambda w, data: v.choosePlotColor(data))
# auskommentieren, um die Vorschub-Farbe zu ändern
#v.setColorsAttribute('FEED',(0,1,0))
# und alle Farben auf dem Terminal auszugeben
#print(v.colors)
v.model = Collection([model, world])
size = 600
v.distance = size * 3
v.near = size * 0.01
v.far = size * 10.0
v.tool2view = tooltip
v.world2view = world
v.work2view = work
mainLayout = QHBoxLayout()
mainLayout.addWidget(self.glWidget)
self.setLayout(mainLayout)
# Wenn Sie diese Datei direkt aus Python3 aufrufen, wird ein PyQt5-Fenster angezeigt.
# das sich gut eignet, um die Teile der Baugruppe zu bestätigen.
if __name__ == '__main__':
main(model, tooltip, work, size=600, hud=None, lat=-75, lon=215)