El script halshow puede ayudarle a revisar HAL en ejecución. Este es un sistema muy especializado y debe conectarse con HAL en funcionamiento. No puede ejecutarse de forma independiente porque depende de la capacidad de HAL para informar de lo que sabe de sí mismo a través de la biblioteca de interfaz halcmd; esto se basa en el descubrimiento de sus propias capacidades. Cada vez que halshow se ejecuta con un LinuxCNC diferente, la configuración será diferente.
Como veremos, esta capacidad de HAL para documentarse es clave para hacer un sistema CNC efectivo.
1. Comenzando Halshow
Halshow se encuentra en el menú AXIS en Máquina > Mostrar Configuración HAL.
Halshow está en TkLinuxCNC bajo el menú Scripts > HAL Show.
Halshow se puede iniciar desde una línea de comandos del terminal y especificar formatos para elementos enteros y de punto flotante (pines o señales) e identificar un archivo guardado de lista de seguimiento para su utilización:
$ halshow --help
Uso:
halshow [Opciones] [watchfile]
Opciones:
--help (esta ayuda)
--fformat format_string_for_float
--iformat format_string_for_int
Notas:
Cree un archivo de seguimiento en halshow usando: 'Archivo > Guardar lista de seguimiento'
linuxcnc debe estar ejecutándose para uso independienteEjemplo para limitar a cinco el número de decimales para flotantes y usar un archivo llamado my.halshow en el directorio actual:
$ halshow --fformat ".5f" ./my.halshow2. Area de Arbol HAL
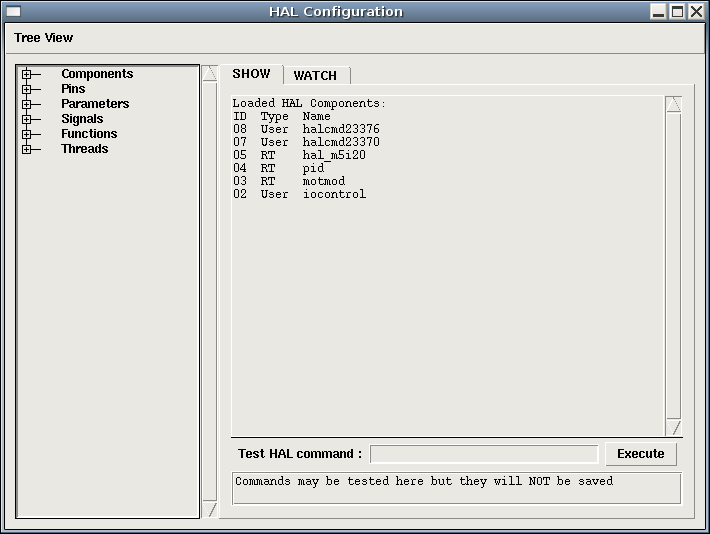
A la izquierda de su pantalla, como se muestra en la figura, hay una vista de árbol parecido al de los navegadores de archivos. A la derecha hay un cuaderno con las pestañas SHOW (ver) y WATCH (observar).
El árbol muestra todas las partes principales de HAL. Delante de cada una hay un pequeño signo más (+) o menos (-) en un recuadro. Al hacer clic en el signo (+) se expande el nodo del árbol para mostrar lo que está bajo de él. Si esa casilla muestra un signo menos (-), al hacer clic en él, contraerá esa sección del árbol.
También puede expandir o contraer la visualización del árbol usando el menu Tree View en el borde superior izquierdo de la pantalla. Bajo Tree View podrá encontrar: Expandir Árbol, Contraer árbol, Expandir pines, Expandir parámetros, Expandir Señales y Borrar Observacion (Erase Watch). (Tenga en cuenta que Erase Watch borra todo lo previamente establecido en WATCH; no puede borrar solo un item.)
3. Area Show HAL
Al hacer clic en el nombre de un nodo, "Components" por ejemplo, mostrara (en la pestaña "SHOW") todos los contenidos HAL sobre ese nodo. La Figura [cap:halshow-layout] muestra una lista exactamente como la veria si hace clic en el nombre de "Components" mientras ejecuta, por ejemplo, una tarjeta servo Mesa m5i20 estándar. La información en pantalla es exactamente como la que se muestran en las herramientas tradicionales de análisis de HAL basadas en texto. La ventaja aquí es que tenemos acceso con un clic del mouse, acceso que puede ser tan amplio o tan enfocado como se necesite.
Si echamos un vistazo más de cerca a la pantalla del árbol podemos ver que las seis partes principales de HAL pueden expandirse al menos en un nivel. Cuando estos niveles se expanden, puede enfocarse más lo que interesa haciendo clic en el nodo de árbol más a la derecha. Usted encontrará que hay algunos pines y parámetros HAL que muestran más de una respuesta. Esto se debe a la naturaleza de las rutinas de búsqueda en halcmd. Si busca un pin determinado, puede obtener dos, como en este caso:
Component Pins:
Owner Type Dir Value Name
06 bit -W TRUE parport.0.pin-10-in
06 bit -W FALSE parport.0.pin-10-in-notEl nombre del segundo pin contiene el nombre completo del primero.
Debajo del área de exhibición a la derecha hay un conjunto de widgets que permitirán interactuar con HAL. Los comandos que se ingresan aquí y los efecto que tienen en el HAL en ejecución no se guardan. Seran persistentes mientras LinuxCNC permanezca activo, pero se borraran tan pronto como LinuxCNC se cierre.
El cuadro de entrada etiquetado "Comando de prueba HAL:" aceptará cualquiera de los comandos listados para halcmd. Éstos incluyen:
-
loadrt, unloadrt (cargar/descargar módulo en tiempo real)
-
loadusr, unloadusr (cargar/descargar componente de espacio de usuario)
-
addf, delf (agregar/eliminar una función a/desde un hilo en tiempo real)
-
net (crear una conexión entre dos o más elementos)
-
setp (establecer parámetro o pin a un valor)
Este pequeño editor ingresará un comando cada vez que presione <enter> o presione el botón Execute. Cuando estos comandos no están formados correctamente, se mostrará un mensaje de error de halcmd. Si no está seguro de cómo configurar un comando adecuado, necesitará leer una vez más la documentación sobre halcmd y los módulos específicos que está utilizando.
Usemos este editor para agregar un módulo diferencial a un HAL y conéctarlo a la posición del eje para que podamos ver la tasa de cambio de posición, es decir, la aceleración. Primero necesitamos cargar un componente HAL llamado ddt; agréguelo al hilo del servo. Luego conéctelo al pin de posición de una articulación. Una vez hecho esto podemos encontrar la salida del diferenciador en halscope. Veamoslo.
loadrt ddtAhora mire el nodo de componentes y debería ver ddt en algún lugar.
Loaded HAL Components:
ID Type Name
10 User halcmd29800
09 User halcmd29374
08 RT ddt
06 RT hal_parport
05 RT scope_rt
04 RT stepgen
03 RT motmod
02 User iocontrolPor supuesto, ahí está. Tenga en cuenta que su ID es 08. A continuación necesitamos averigüar qué funciones están disponibles con él, por lo que seleccionaremos el nodo funciones:
Exported Functions:
Owner CodeAddr Arg FP Users Name
08 E0B97630 E0DC7674 YES 0 ddt.0
03 E0DEF83C 00000000 YES 1 motion-command-handler
03 E0DF0BF3 00000000 YES 1 motion-controller
06 E0B541FE E0DC75B8 NO 1 parport.0.read
06 E0B54270 E0DC75B8 NO 1 parport.0.write
06 E0B54309 E0DC75B8 NO 0 parport.read-all
06 E0B5433A E0DC75B8 NO 0 parport.write-all
05 E0AD712D 00000000 NO 0 scope.sample
04 E0B618C1 E0DC7448 YES 1 stepgen.capture-position
04 E0B612F5 E0DC7448 NO 1 stepgen.make-pulses
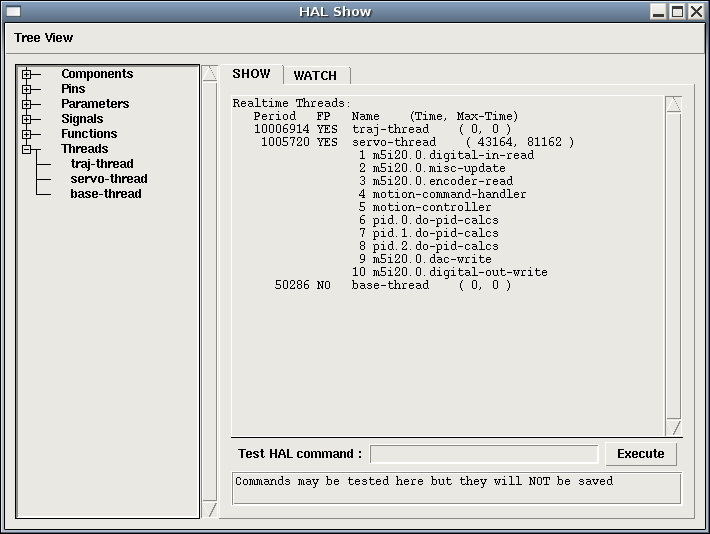
04 E0B614AD E0DC7448 YES 1 stepgen.update-freqAquí buscamos el ID 08 y vemos una función llamada ddt.0. Deberíamos poder agregar ddt.0 al hilo del servo y hará sus cálculos cada vez que se actualice ese hilo. El comando addf usa tres argumentos como estos:
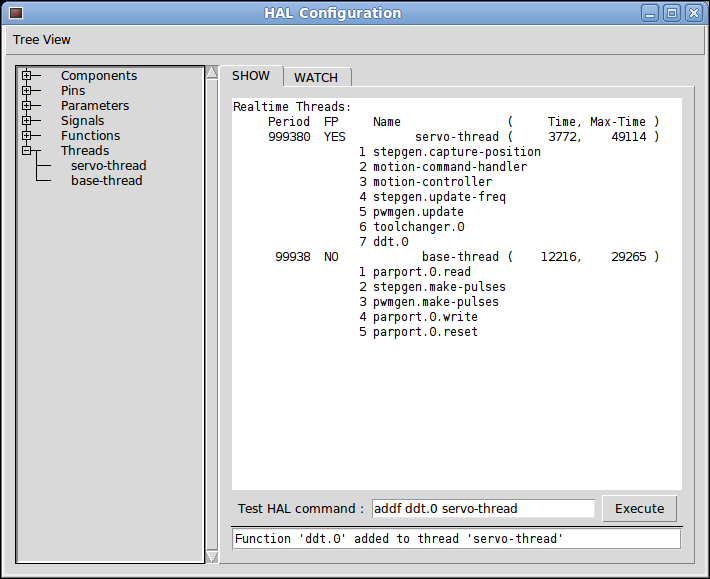
addf <functname> <nombre de hilo> [<posición>]Ya conocemos la functname = ddt.0, así que obtengamos el nombre del hilo correcto expandiendo el nodo de hilos (Threads) en el árbol. Aquí vemos dos hilos; hilo servo e hilo base. La posición de ddt.0 en el hilo no es crítica. Agregemos la función ddt.0 al hilo servo:
addf ddt.0 servo-threadEsto es solo para ver su valor, así que dejamos [<posición>] en blanco y la funcion queda en la última posición en el hilo. La siguiente figura muestra el estado de halshow después de que este comando ha sido emitido.
A continuación necesitamos conectar ddt a algo. Pero ¿cómo sabemos qué pines están disponibles?. La respuesta es mirar debajo de los pines. Ahí encontraremos ddt y se vera esto:
Component Pins:
Owner Type Dir Value Name
08 float R- 0.00000e+00 ddt.0.in
08 float -W 0.00000e+00 ddt.0.outParece fácil de entender, pero ¿qué señal o pin queremos conectar a ddt?. Podría ser un pin de eje, un pin de stepgen o una señal. Vemos esto cuando miramos joint.0:
Component Pins:
Owner Type Dir Value Name
03 float -W 0.00000e+00 joint.0.motor-pos-cmd ==> Xpos-cmdAsí que parece que Xpos-cmd debería ser una buena señal para usar. De vuelta al editor, donde ingresamos el siguiente comando:
linksp Xpos-cmd ddt.0.inAhora, si observamos la señal Xpos-cmd usando el nodo del árbol, veremos lo que hemos hecho
Signals:
Type Value Name
float 0.00000e+00 Xpos-cmd
<== joint.0.motor-pos-cmd
==> ddt.0.in
==> stepgen.0.position-cmdVemos que esta señal proviene de joint.0.motor-pos-cmd y va a ddt.0.in y stepgen.0.position-cmd. Al conectar nuestro bloque a la señal hemos evitado cualquier complicación con el flujo normal de este comando de movimiento.
El area Show utiliza halcmd para descubrir lo que está sucediendo en un HAL en ejecucion. Da información completa sobre lo que ha descubierto. También se actualiza a medida que se emiten los comandos en el pequeño panel de edición para modificar esa HAL. Hay momentos en que se quiere que se muestren un conjunto diferente de cosas sin toda la información disponible en este area. Ahí es donde el Área WATCH de HAL es de valor.
4. Pestaña WATCH
Al hacer clic en la pestaña WATCH aparece un cuadro en blanco. Puede añadir señales y pines
a este cuadro y ver sus valores.
[La frecuencia de actualización de la
pantalla es mucho más baja que Halmeter o Halscope. Si necesita buena resolucion
del tiempo de las señales, esas herramientas son mucho más efectivas.]
Usted puede agregar
señales o pines cuando se muestra la pestaña WATCH haciendo clic en sus nombres.
La siguiente figura muestra este cuadro con varias señales de tipo "bit". Estas
señales incluyen habilitación de salida (enable-out) para los primeros tres ejes y dos de las tres
señales de "estop" de iocontrol. Observe que los ejes no están habilitados aunque
las señales de parada indican que LinuxCNC no está en parada. Una mirada rápida a la gui de usuario
muestra que la condición de LinuxCNC es ESTOP RESET (para TkLinuxCNC) u OFF (en Axis, esquina inferior izquierda).
La habilitacion del amplificador no pasara a verdadero hasta que la máquina se haya encendido.
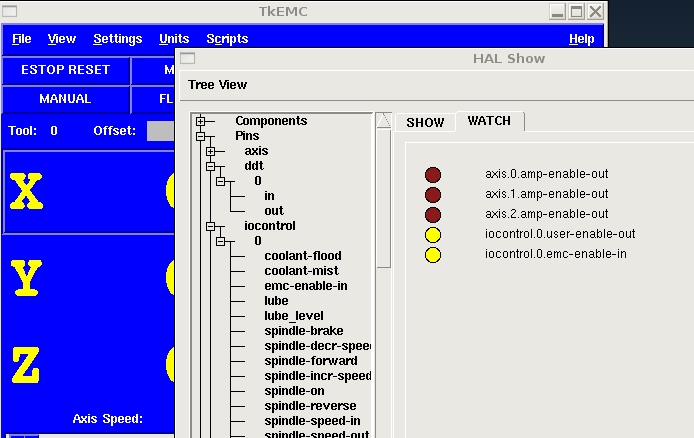
WATCH muestra valores de tipo de bit (binarios) utilizando círculos de colores representando leds. Se muestran en color marrón oscuro cuando la señal de bit o el pin son Falso, y amarillo claro si es verdadero. Si selecciona un pin o señal que no es una señal de tipo bit (binario), WATCH mostrará un valor numérico.
WATCH permite probar rápidamente interruptores o ver el efecto de los cambios que realice en LinuxCNC mientras utiliza la interfaz gráfica. La frecuencia de actualización de WATCH es un poco lenta para ver los pulsos de paso, pero puede usarlo para eso si mueve un eje muy lentamente o en muy pequeños incrementos de distancia. Si ha usado IO_Show en LinuxCNC, la página de visualización en halshow puede configurarse para ver un parport como lo hizo con IO_Show.