Figure: Diagramme bloc du générateur de pas (en mode position)
Figure: Diagramme bloc du générateur de pas (en mode position)La plupart des composants ont leurs pages de manuel, style *nix. Pour afficher ces “man pages” pour les composants temps réel, taper dans un terminal “man 9 nomducomposant”.
Le présent document se concentre sur les composants les plus complexes qui demandent des figures difficiles à reproduire dans une man page.
Ce composant fournit un générateur logiciel d'impulsions de pas répondant aux commandes de position ou de vitesse. En mode position, il contient une boucle de position pré-réglée, de sorte que les réglages de PID ne sont pas nécessaires. En mode vitesse, il pilote un moteur à la vitesse commandée, tout en obéissant aux limites de vitesse et d'accélération. C'est un composant uniquement temps réel, dépendant de plusieurs facteurs comme la vitesse du CPU, etc, il est capable de fournir des fréquences de pas maximum comprisent entre 10kHz et 50kHz. La figure [.] montre trois schémas fonctionnels, chacun est un simple générateur d'impulsions de pas. Le premier diagramme est pour le type '0', (pas et direction). Le second est pour le type '1' (up/down, ou pseudo-PWM) et le troisième est pour les types 2 jusqu'à 14 (les différentes séquences de pas). Les deux premiers diagrammes montrent le mode de commande position et le troisième montre le mode vitesse. Le mode de commande et le type de pas, se réglent indépendamment et n'importe quelle combinaison peut être choisie.
emc2$ halcmd loadrt stepgen step_type=<type-array> [ctrl_type=<ctrl_array>]
<type-array> est une série d'entiers décimaux séparés par des virgules. Chaque chiffre provoquera le chargement d'un simple générateur d'impulsions de pas, la valeur de ce chiffre déterminera le type de pas. <ctrl_array> est une série de lettres “p” ou “v” séparées par des virgules, qui spécifient le mode pas ou le mode vitesse. ctrl_type est optionnel, si il est omis, tous les générateurs de pas seront en mode position. Par exemple, la commande:
emc2# halcmd loadrt stepgen.o step_type=0,0,2 ctrl_type=p,p,v
va installer trois générateurs de pas. Les deux premiers utilisent le type de pas '0' (pas et direction) et fonctionnent en mode position. Le dernier utilise le type de pas '2' (quadrature) et fonctionne en mode vitesse. La valeur par défaut de <config-array> est “0,0,0” qui va installer trois générateurs de type '0' (step/dir). Le nombre maximum de générateurs de pas est de 8 (comme définit par MAX_CHAN dans stepgen.c). Chaque générateur est indépendant, mais tous sont actualisés par la même fonction(s), au même instant. Dans les descriptions qui suivent, <chan> est le nombre de générateurs spécifiques. La numérotation des générateurs commence à 0.
emc2$ halcmd unloadrt stepgen
Chaque générateur d'impulsions de pas n'aura que certaines de ces pins, selon le type de pas et le mode de contrôle sélectionné.
En mode position, les valeurs de maxvel et de maxaccel sont utilisées par la boucle de position interne pour éviter de générer des trains d'impulsions de pas que le moteur ne peut pas suivre. Lorsqu'elles sont réglées sur des valeurs appropriées pour le moteur, même un grand changement instantané dans la position commandée produira un mouvement trapézoïdal en douceur vers la nouvelle position. L'algorithme fonctionne en mesurant à la fois, l'erreur de position et l'erreur de vitesse, puis en calculant une accélération qui tende à réduire vers zéro, les deux en même temps. Pour plus de détails, y compris les contenus de la boîte “d'équation de contrôle”, consulter le code source.
En mode vitesse, maxvel est une simple limite qui est appliquée à la vitesse commandée, maxaccel est utilisé pour créer une rampe avec la fréquence actuelle, si la vitesse commandée change brutalement. Comme dans le mode position, des valeurs appropriées de ces paramètres assurent que le moteur pourra suivre le train d'impulsions généré.
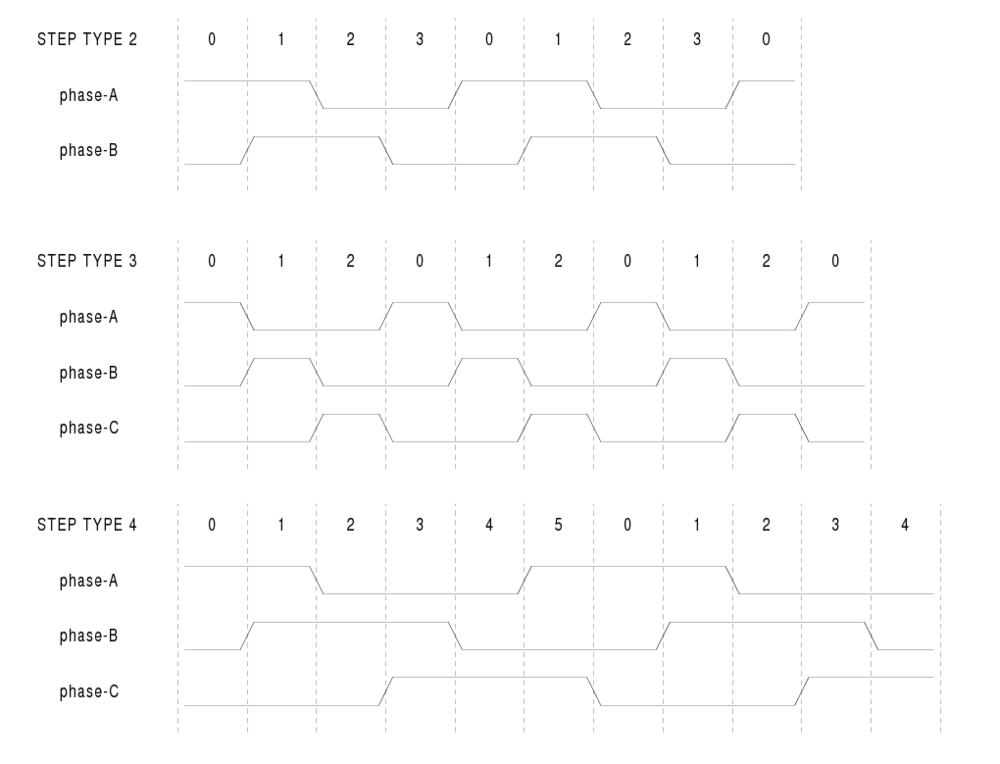
Le générateur de pas supporte 15 différentes “séquences de pas”. Le type de pas 0 est le plus familier, c'est le standard pas et direction (step/dir). Quand stepgen est configuré pour le type 0, il y a quatre paramètres supplémentaires qui déterminent le timing exact des signaux de pas et de direction. Voir la figure [.] pour la signification de ces paramètres. Les paramètres sont en nanosecondes, mais ils doivent être arrondis à un entier, multiple de la période du thread qui appelle make_pulses(). Par exemple, si make_pulses() est appelée toutes les 16µs et que “steplen” est à 20000, alors l'impulsion de pas aura une durée de 2 x 16 = 32µs. La valeur par défaut de ces quatre paramètres est de 1ns, mais l'arrondi automatique prendra effet au premier lancement du code. Puisqu'un pas exige d'être haut pendant “steplen”ns et bas pendant “stepspace”ns, la fréquence maximale est 1.000.000.000 divisé par (steplen+stepspace). Si “maxfreq” est réglé plus haut que cette limite, il sera abaissé automatiquement. Si “maxfreq” est à zéro, il restera à zéro, mais la fréquence de sortie sera toujours limitée.
Le type de pas 1 a deux sorties, up et down. Les impulsions apparaissent sur l'une ou l'autre, selon la direction du déplacement. Chaque impulsion a une durée de “steplen”ns et les impulsions sont séparées de “stepspace”ns. La fréquence maximale est la même que pour le type 0. Si “maxfreq” est réglé plus haut que cette limite il sera abaissé automatiquement. Si “maxfreq” est à zéro, il restera à zéro, mais la fréquence de sortie sera toujours limitée.
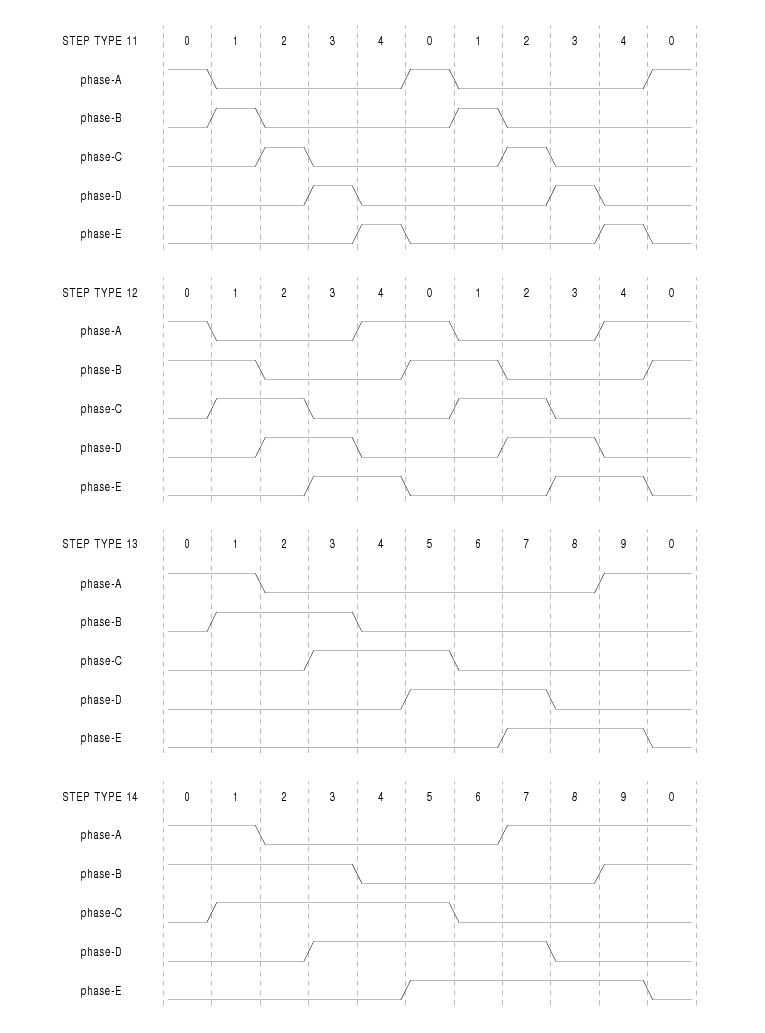
Les séquences 2 jusqu'à 14 sont basées sur les états et ont entre deux et cinq sorties. Pour chaque pas, un compteur d''état est incrémenté ou décrémenté. Les figures [.], [.] et [.] montrent les différentes séquences des sorties en fonction de l'état du compteur. La fréquence maximale est 1.000.000.000 divisé par “steplen” et comme dans les autres séquences, “maxfreq” sera abaissé si il est au dessus de cette limite.
Le composant exporte trois fonctions. Chaque fonction agit sur tous les générateurs d'impulsions de pas. Lancer différents générateurs dans différents threads n'est pas supporté.
La fonction à grande vitesse “stepgen.make-pulses” devrait être lancée dans un thread très rapide, entre 10 et 50µs selon les capacités de l'ordinateur. C'est la période de ce thread qui détermine la fréquence maximale des pas, de steplen, stepspace, dirsetup, dirhold et dirdelay, tous sont arrondis au multiple entier de la période du thread en nanosecondes. Les deux autres fonctions peuvent être appelées beaucoup plus lentement.
Ce composant fournit un générateur logiciel de PWM (modulation de largeur d'impulsions) et PDM (modulation de densité d'impulsions). C'est un composant temps réel uniquement, dépendant de plusieurs facteurs comme la vitesse du CPU, etc, Il est capable de générer des fréquences PWM de quelques centaines de Hertz en assez bonne résolution, à peut-être 10kHz avec une résolution limitée.
emc2$ halcmd loadrt pwmgen output_type=<config-array>
<config-array> est une série d'entiers décimaux séparés par des virgules. Chaque chiffre provoquera le chargement d'un simple générateur de PWM, la valeur de ce chiffre determinera le type de sortie. Par exemple:
emc2$ halcmd loadrt pwmgen step_type=0,1,2
va installer trois générateurs de PWM. Le premier utilisera une sortie de type '0' (PWM seule), le suivant utilisera une sortie de type 1 (PWM et direction) et le troisième utilisera une sortie de type 2 (UP et DOWN). Il n'y a pas de valeur par défaut, si <config-array> n'est pas spécifié, aucun générateur de PWM ne sera installé. Le nombre maximum de générateurs de fréquences est de 8 (comme définit par MAX_CHAN dans pwmgen.c). Chaque générateur est indépendant, mais tous sont mis à jour par la même fonction(s), au même instant. Dans les descriptions qui suivent, <chan> est le nombre de générateurs spécifiques. La numérotation des générateurs de PWM commence à 0.
emc2$ halcmd unloadrt pwmgen
Chaque générateur de PWM aura les pins suivantes:
Chaque générateur de PWM aura également certaines de ces pins, selon le type de sortie choisi:
Le générateur de PWM supporte trois “types de sortie”. Le type 0 a une seule pin de sortie. Seules, les commandes positives sont acceptées, les valeurs négatives sont traitées comme zéro (elle seront affectées par min-dc si il est différent de zéro). Le type 1 a deux pins de sortie, une pour le signal PWM/PDM et une pour indiquer la direction. Le rapport cyclique d'une pin PWM est basé sur la valeur absolue de la commande, de sorte que les valeurs négatives sont acceptables. La pin de direction est fausse pour les commandes positives et vraie pour les commandes négatives. Finalement, le type 2 a également deux sorties, appelées “up” et “down”. Pour les commandes positives, le signal PWM apparaît sur la sortie up et la sortie down reste fausse. Pour les commandes négatives, le signal PWM apparaît sur la sortie down et la sortie up reste fausse. Les sorties de type 2 sont appropriées pour piloter la plupart des ponts en H.
Le composant exporte deux fonctions. Chaque fonction agit sur tous les générateurs de PWM, lancer différents générateurs dans différents threads n'est pas supporté.
La fonction haute vitesse “pwmgen.make-pulses” devrait être lancée dans un thread très rapide, entre 10 et 50µs selon les capacités de l'ordinateur. C'est la période de ce thread qui détermine la fréquence maximale de la porteuse PWM, ainsi que la résolution des signaux PWM ou PDM. L'autre fonction peut être appelée beaucoup plus lentement.
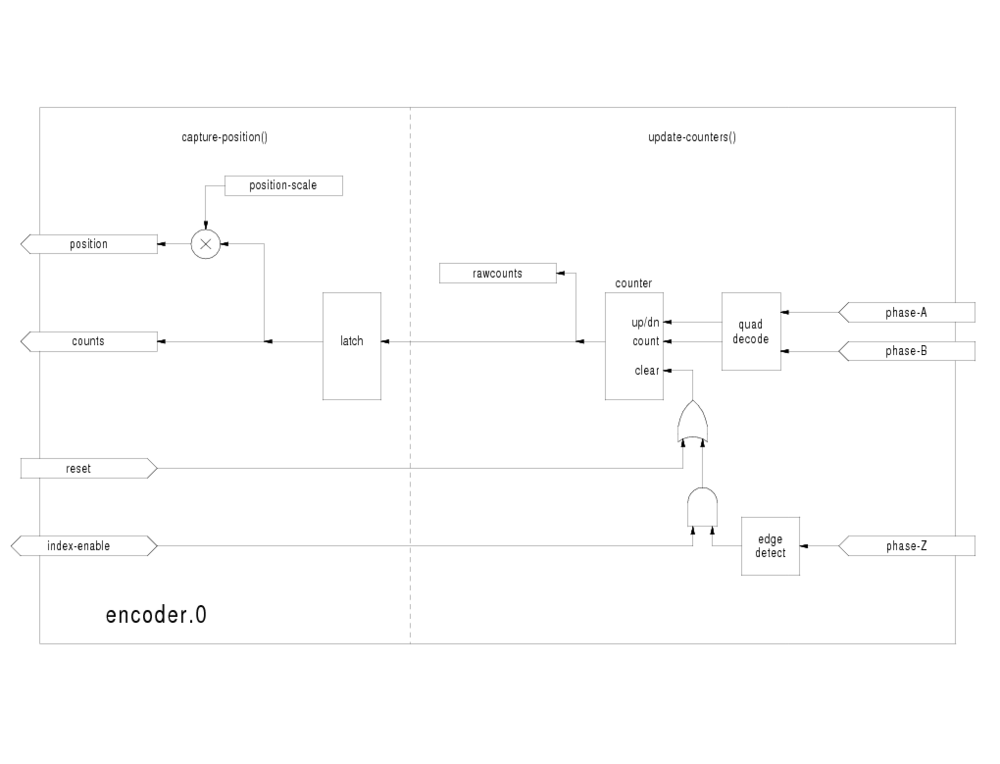
Ce composant fournit, en logiciel, le comptage des signaux provenant d'encodeurs en quadrature. Il s'agit d'un composant temps réel uniquement, il est dépendant de divers facteurs comme la vitesse du CPU, etc, il est capable de compter des signaux de fréquences comprises entre 10kHz à peut être 50kHz. La figure [.] est le diagramme bloc d'un canal de comptage de codeur.
emc2$ halcmd loadrt encoder [num_chan=<counters>]
<counters> est le nombre de compteurs de codeur à installer. Si numchan n'est pas spécifié, trois compteurs seront installés. Le nombre maximum de compteurs est de 8 (comme définit par MAX_CHAN dans encoder.c). Chaque compteur est indépendant, mais tous sont mis à jour par la même fonction(s) au même instant. Dans les descriptions qui suivent, <chan> est le nombre de compteurs spécifiques. La numérotation des compteurs commence à 0.
emc2$ halcmd unloadrt encoder
Le composant exporte deux fonctions. Chaque fonction agit sur tous les compteurs de codeur, lancer différents compteurs de codeur dans différents threads n'est pas supporté.
Ce composant fournit une boucle de contrôle Proportionnel/Intégrale/Dérivée. C'est un composant temps réel uniquement. Par souci de simplicité, cette discussion suppose que nous parlons de boucles de position, mais ce composant peut aussi être utilisé pour implémenter d'autres boucles de rétroaction telles que vitesse, hauteur de torche, température, etc. La figure [.] est le schéma fonctionnel d'une simple boucle PID.
emc2$ halcmd loadrt pid [num_chan=<loops>] [debug=1]
<loops> est le nombre de boucles PID à installer. Si numchan n'est pas spécifié, une seule boucle sera installée. Le nombre maximum de boucles est de 16 (comme définit par MAX_CHAN dans pid.c). Chaque boucle est complétement indépendante. Dans les descriptions qui suivent, <loopnum> est le nombre de boucles spécifiques. La numérotation des boucle PID commence à 0.
Si debug=1 est spécifié, le composant exporte quelques paramètres destinés au déboguage et aux réglages. Par défaut, ces paramètres ne sont pas exportés, pour économiser la mémoire partagée et éviter d'encombrer la liste des paramètres.
emc2$ halcmd unloadrt pid
Les trois principales pins sont:
Pour une boucle de position, 'command' et 'feedback' sont en unités de longueur. Pour un axe linéaire, cela pourrait être des pouces, mm, mètres, ou tout autre unité pertinente. De même pour un axe angulaire, ils pourraient être des degrés, radians, etc. Les unités sur la pin 'output' représentent l'écart nécessaire pour que la rétroaction coïncide avec la commande. Pour une boucle de position, 'output' est une vitesse exprimée en pouces/seconde, mm/seconde, degrés/seconde, etc. Les unités de temps sont toujours des secondes et les unités de vitesses restent cohérentes avec les unités de longueur. Si la commande et la rétroaction sont en mètres, la sortie sera en mètres par seconde.
Chaque boucle PID a deux autres pins qui sont utilisées pour surveiller ou contrôler le fonctionnement général du composant.
Le gain PID, les limites et autres caractèristiques 'accordables' de la boucle sont implémentés comme des paramètres.
Toutes les limites max???, sont implémentées de sorte que si la valeur de ce paramètre est à zéro, il n'y a pas de limite.
Si debug=1 est spécifié quand le composant est installé, quatre paramètres supplémentaires seront exportés:
Le composant exporte une fonction pour chaque boucle PID. Cette fonction exécute tous les calculs nécessaires à la boucle. Puisque chaque boucle a sa propre fonction, les différentes boucles peuvent être incluses dans les différents threads et exécutées à différents rythmes.
Si vous voulez comprendre exactement l'algorithme utilisé pour calculer la sortie d'une boucle PID, référez vous à la figure [.], les commentaires au début du source emc2/src/hal/components/pid.c et bien sûr, au code lui même. Les calculs de boucle sont dans la fonction C calc_pid().
Le codeur simulé est exactement la même chose qu'un codeur. Il produit des impulsions en quadrature avec une impulsion d'index, à une vitesse contrôlée par une pin de HAL. Surtout utile pour les essais.
emc2$ halcmd loadrt sim-encoder num_chan=<number>
<number> est le nombre de codeurs à simuler. Si aucun n'est spécifié, un seul codeur sera installé. Le nombre maximum de codeurs est de 8 (comme définit par MAX_CHAN dans sim_encoder.c).
emc2$ halcmd unloadrt sim-encoder
Quand .speed est positive, .phase-A mène .phase-B.
Noter que les impulsions par tour ne sont pas identiques aux valeurs de comptage par tour (counts). Une impulsion est un cycle complet de quadrature. La plupart des codeurs comptent quatre fois pendant un cycle complet.
Le composant exporte deux fonctions. Chaque fonction affecte tous les codeurs simulés.
L'anti-rebond est un composant temps réel capable de filtrer les rebonds créés par les contacts mécaniques. Il est également très utile dans d'autres applications, où des impulsions très courtes doivent être supprimées.
emc2$ halcmd loadrt debounce cfg=”<config-string>”
<config-string> est une série d'entiers décimaux séparés par des espaces. Chaque chiffre installe un groupe de filtres anti-rebond identiques, le chiffre détermine le nombre de filtres dans le groupe. Par exemple:
emc2$ halcmd loadrt debounce cfg=”1 4 2”
va installer trois groupes de filtres. Le groupe 0 contient un filtre, le groupe 1 en contient quatre et le groupe 2 en contient deux. La valeur par défaut de <config-string> est “1” qui installe un seul groupe contenant un seul filtre. Le nombre maximum de groupes est de 8 (comme définit par MAX_GROUPS dans debounce.c). Le nombre maximum de filtres dans un groupe est limité seulement par l'espace de la mémoire partagée. Chaque groupe est complétement indépendant. Tous les filtres dans un même groupe sont identiques et ils sont tous mis à jour par la même fonction, au même instant. Dans les descriptions qui suivent, <G> est le numéro du groupe et <F> est le numéro du filtre dans le groupe. Le premier filtre est le filtre 0 dans le groupe 0.
emc2$ halcmd unloadrt debounce
Chaque filtre individuel a deux pins.
Chaque groupe de filtre a un paramètre2.
Le délai du filtre est dans l'unité de la période du thread. Le délai minimum est de zéro. La sortie d'un filtre avec un délai de zéro, suit exactement son entrée, il ne filtre rien. Plus le délai augmente, plus larges seront les impulsions rejetées. Si le délai est de 4, toutes les impulsions égales ou inférieures à quatre périodes du thread, seront rejetées.
Chaque groupe de filtres exporte une fonction qui met à jour tous les filtres de ce groupe “simultanément”. Différents groupes de filtres peuvent être mis à jour dans différents threads et à différentes périodes.
Siggen est un composant temps réel qui génère des signaux carrés, triangulaires et sinusoïdaux. Il est principalement utilisé pour les essais.
emc2$ halcmd loadrt siggen [num_chan=<chans>]
<chans> est le nombre de générateurs de signaux à installer. Si numchan n'est pas spécifié, un seul générateur de signaux sera installé. Le nombre maximum de générateurs est de 16 (comme définit par MAX_CHAN dans siggen.c). Chaque générateur est complétement indépendant. Dans les descriptions qui suivent, <chan> est le numéro d'un générateur spécifique. Les numéros de générateur commencent à 0.
emc2$ halcmd unloadrt siggen
Chaque générateur a cinq pins de sortie.
Les cinq sorties ont les mêmes fréquence, amplitude et offset.
Trois pins de contrôle s'ajoutent aux pins de sortie:
Par exemple, si siggen.0.amplitude est à 1.0 et siggen.0.offset est à 0.0, les sorties oscilleront entre -1.0 et +1.0. Si siggen.0.amplitude est à 2.5 et siggen.0.offset est à 10.0, les sorties oscilleront entre 7.5 et 12.5.
Aucun. 3
1 FF2 n'est actuellement pas implémenté, mais il pourrait l'être. Considérez cette note “FIXME” dans le code.
2 Chaque filtre individuel a également une variable d'état interne. C'est un switch du compilateur qui peut exporter cette variable comme un paramètre. Ceci est prévu pour des essais et devrait juste être un gaspillage de mémoire partagée dans des circonstances normales.
3 Dans les versions antérieures à la 2.1, fréquence, amplitude et offset étaient des paramètres. Ils ont été modifiés en pins pour permettre le contrôle par d'autres composants.