1. What is latency?
Latency is how long it takes the PC to stop what it is doing and respond to an external request, such as running one of LinuxCNC’s periodic realtime threads. The lower the latency, the faster you can run the realtime threads, and the smoother motion will be (and potentially faster, in the case of software stepping).
Latency is far more important than CPU speed. A lowly Pentium II that responds to interrupts within 10 microseconds each and every time can give better results than the latest and fastest P4 Hyperthreading beast.
The CPU isn’t the only factor in determining latency. Motherboards, video cards, USB ports, and a number of other things can hurt the latency. The best way to find out what you are dealing with is to run the latency test.
Generating step pulses in software has one very big advantage - it’s free. Just about every PC has a parallel port that is capable of outputting step pulses that are generated by the software. However, software step pulses also have some disadvantages:
-
limited maximum step rate
-
jitter in the generated pulses
-
loads the CPU
2. Latency Tests
LinuxCNC includes several latency tests. They all produce equivalent information. Running these tests will help determine if a computers is suitable for driving a CNC machine.
| Do not run LinuxCNC or StepConf while the latency test is running. |
2.1. Latency Test
To run the test, open a terminal window (in Ubuntu, from Applications → Accessories → Terminal) and run the following command:
latency-testThis will start the latency test with a base-thread period of 25 µs and a servo-thread period of 1 ms. The period times may be specified on the command line:
latency-test 50000 1000000This will start the latency test with a base-thread period of 50 µs and a servo-thread period of 1 ms.
For available options, on the command line enter:
latency-test -hAfter starting a latency test you should see something like this:
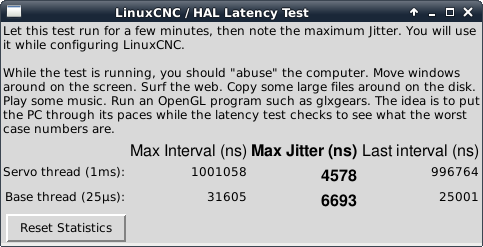
While the test is running, you should abuse the computer. Move windows around on the screen. Surf the web. Copy some large files around on the disk. Play some music. Run an OpenGL program such as glxgears. The idea is to put the PC through its paces while the latency test checks to see what the worst case numbers are.
The important number for software stepping is the max jitter of the base thread. In the example above, that is 6693 nanoseconds (ns), or 6.693 microseconds (µs). Record this number, and enter it in StepConf when it is requested.
In the example above, latency-test only ran for a few seconds. You should run the test for at least several minutes; sometimes the worst case latency doesn’t happen very often, or only happens when you do some particular action. For instance, one Intel motherboard worked pretty well most of the time, but every 64 seconds it had a very bad 300 µs latency. Fortunately that was fixable, see https://wiki.linuxcnc.org/cgi-bin/wiki.pl?FixingSMIIssues .
So, what do the results mean? If your Max Jitter number is less than about 15-20 microseconds (15000-20000 nanoseconds), the computer should give very nice results with software stepping. If the max latency is more like 30-50 microseconds, you can still get good results, but your maximum step rate might be a little disappointing, especially if you use microstepping or have very fine pitch leadscrews. If the numbers are 100 µs or more, i.e. >= 100,000 nanoseconds (ns), then the PC is not a good candidate for software stepping. Numbers over 1 millisecond (1,000,000 ns) mean the PC is not a good candidate for LinuxCNC, regardless of whether you use software stepping or not.
| If you get high numbers, there may be ways to improve them. Another PC had very bad latency (several milliseconds) when using the onboard video. But a $5 used video card solved the problem. LinuxCNC does not require bleeding edge hardware. |
For more information on stepper tuning see the Stepper Tuning Chapter.
| Additional command line tools are available for examining latency when LinuxCNC is not running. |
2.2. Latency Plot
latency-plot makes a strip chart recording for a base and a servo thread. It may be useful to see spikes in latency when other applications are started or used. Usage:
latency-plot --help
Usage:
latency-plot --help | -?
latency-plot --hal [Options]
Options:
--base ns (base thread interval in nanoseconds, default: 25000)
--servo ns (servo thread interval in nanoseconds, default: 1000000)
--time ms (report interval in milliseconds, default: 1000)
--relative (relative clock time (default))
--actual (actual clock time)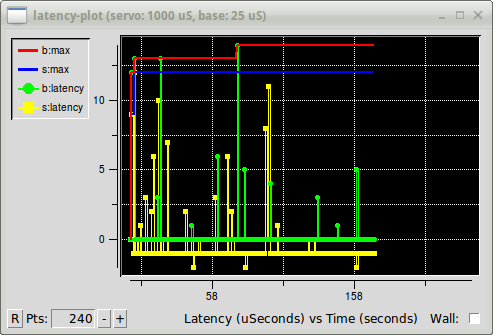
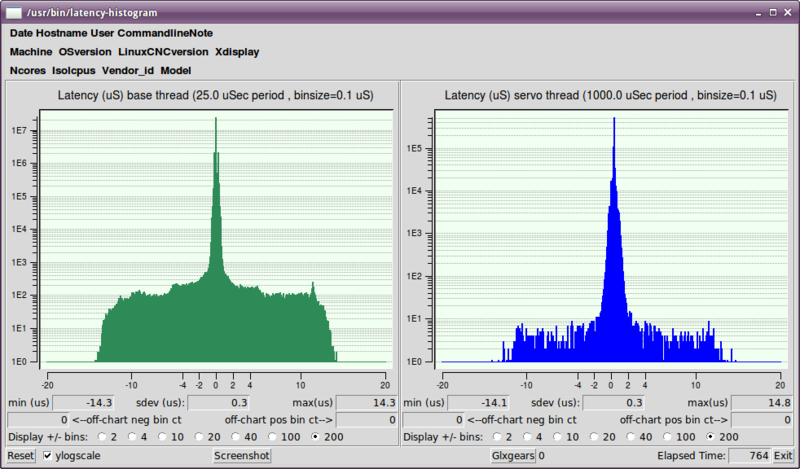
2.3. Latency Histogram
The application latency-histogram displays a histogram of latency (jitter) for a base and servo thread.
Usage:
latency-histogram --help | -?
latency-histogram [Options]
Options:
--base ns (base thread interval in nanoseconds, default: 25000, min: 5000)
--servo ns (servo thread interval in nanoseconds, default: 1000000, min: 25000)
--bbinsize ns (base bin size in nanoseconds, default: 100
--sbinsize ns (servo bin size in nanoseconds, default: 100
--bbins n (base bins, default: 200
--sbins n (servo bins, default: 200
--logscale 0|1 (y axis log scale, default: 1)
--text note (additional note, default: "" )
--show (show count of undisplayed bins)
--nobase (servo thread only)
--verbose (progress and debug)
--nox (no gui, display elapsed,min,max,sdev for each thread)Note: When determining the latency, LinuxCNC and HAL should not be running, stop with halrun -U. Large number of bins and/or small binsizes will slow updates. For single thread, specify --nobase (and options for servo thread). Measured latencies outside of the +/- bin range are reported with special end bars. Use --show to show count for the off-chart [pos|neg] bin
3. Latency tuning
LinuxCNC can run on many different hardware platforms and with many different realtime kernels, and they all may benefit from tuning for optimal latency.
A primary goal in tuning the system for LinuxCNC is to reserve a CPU for the exclusive use of LinuxCNC’s realtime tasks, so that other tasks (both user programs and kernel threads) do not interfere with LinuxCNC’s access to that CPU.
When specific tuning options are believed to be universally helpful LinuxCNC does this tuning automatically at startup, but many tuning options are machine-specific and cannot be done automatically. The person installing LinuxCNC will need to experimentally determine the optimal tuning for their system.
3.1. Tuning the BIOS for latency
PC BIOSes vary wildly in their latency behavior.
Tuning the BIOS is tedious because you have to reboot the computer, make one small tweak in the BIOS, boot Linux, and run the latency test (potentially for a long time) to see what effects your BIOS change had. Then repeat for all the other BIOS settings you want to try.
Because BIOSes are all different and non-standard, providing a detailed BIOS tuning guide is not practical. In general, some things to try tuning in the BIOS are:
-
Disable ACPI, APM, and any other power-saving features. This includes anything related to power saving, suspending, CPU sleep states, CPU frequency scaling, etc.
-
Disable CPU "turbo" mode.
-
Disable CPU hyperthreading.
-
Disable (or otherwise control) System Management Interrupt (SMI).
-
Disable any hardware you do not intend to use.
3.2. Tuning Preempt-RT for latency
The Preempt-RT kernel may benefit from tuning in order to provide the best latency for LinuxCNC. Tuning may be done via the kernel command line, sysctl, and via files in /proc and /sys.
Some tuning parameters to look into:
- Kernel command line
-
Details here: https://www.kernel.org/doc/Documentation/admin-guide/kernel-parameters.txt
-
isolcpus: Prevent most non-LinuxCNC processes from using these CPUs, leaving more CPU time available for LinuxCNC. -
irqaffinity: Select which CPUs service interrupts, so that the CPUs reserved for LinuxCNC realtime don’t have to perform this task. -
rcu_nocbs: Prevent RCU callbacks from running on these CPUs. -
rcu_nocb_poll: Poll for RCU callbacks instead of using sleep/wake. -
nohz_full: Disable clock tick on these CPUs.
-
- Sysctl
-
Details here: https://www.kernel.org/doc/html/latest/scheduler/sched-rt-group.html
-
sysctl.kernel.sched_rt_runtime_us: Set to -1 to remove the limit on how much time realtime tasks may use.
-