The hal_parport component is a driver for the traditional PC parallel port. The port has a total of 17 physical pins. The original parallel port divided those pins into three groups: data, control, and status. The data group consists of 8 output pins, the control group consists of 4 pins, and the status group consists of 5 input pins.
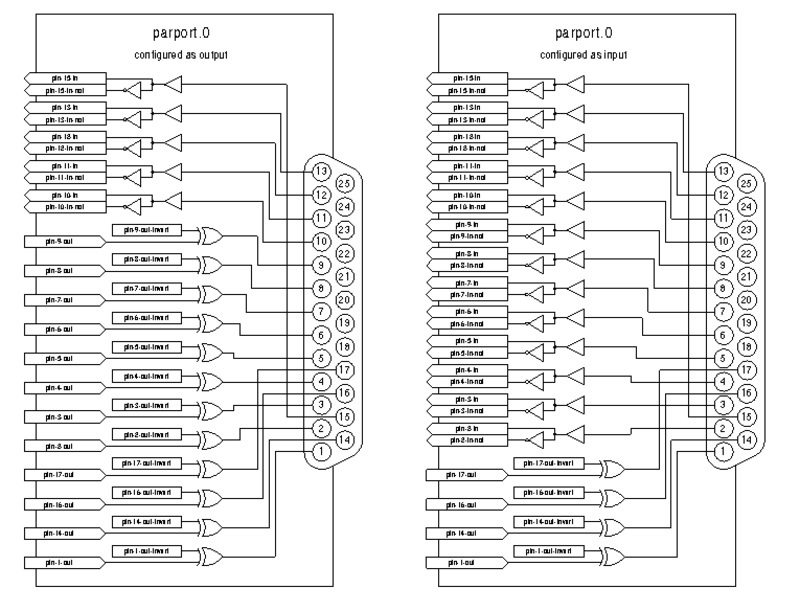
In the early 1990s, the bidirectional parallel port was introduced, which allows the data group to be used for output or input. The HAL driver supports the bidirectional port, and allows the user to set the data group as either input or output. If configured as out, a port provides a total of 12 outputs and 5 inputs. If configured as in, it provides 4 outputs and 13 inputs.
In some parallel ports, the control group pins are open collectors, which may also be driven low by an external gate. On a board with open collector control pins. If configured as x, it provides 8 outputs, and 9 inputs.
In some parallel ports, the control group has push-pull drivers and cannot be used as an input.
|
HAL and Open Collectors
HAL cannot automatically determine if the x mode bidirectional pins are actually open collectors (OC). If they are not, they cannot be used as inputs, and attempting to drive them LOW from an external source can damage the hardware. To determine whether your port has open collector pins, load hal_parport in x mode. With no device attached, HAL should read the pin as TRUE. Next, insert a 470 Ω resistor from one of the control pins to GND. If the resulting voltage on the control pin is close to 0 V, and HAL now reads the pin as FALSE, then you have an OC port. If the resulting voltage is far from 0 V, or HAL does not read the pin as FALSE, then your port cannot be used in x mode. The external hardware that drives the control pins should also use open collector gates, e.g. 74LS05. On some computers, BIOS settings may affect whether x mode can be used. SPP mode is most likely to work. |
No other combinations are supported, and a port cannot be changed from input to output once the driver is installed.
The parport driver can control up to 8 ports (defined by MAX_PORTS in hal_parport.c). The ports are numbered starting at zero.
1. Loading
The hal_parport driver is a real time component so it must be loaded into the real time thread with loadrt. The configuration string describes the parallel ports to be used, and (optionally) their types. If the configuration string does not describe at least one port, it is an error.
loadrt hal_parport cfg="port [type] [port [type] ...]"
Numbers below 16 refer to parallel ports detected by the system. This is the simplest way to configure the hal_parport driver and cooperates with the Linux parport_pc driver if it is loaded. A port of 0 is the first parallel port detected on the system, 1 is the next and so on.
This will use the first parallel port Linux detects:
loadrt hal_parport cfg="0"
Instead, the port address may be specified using the hex notation with the 0x prefix.
The config string represents the hexadecimal address of the port, optionally followed by a direction, all repeated for each port. The directions are in, out, or x, and determine the direction of the physical pins 2 to 9 of the D-Sub 25 connector. If the direction is not specified, the data group will by default be configured as outputs. For example:
loadrt hal_parport cfg="0x278 0x378 in 0x20A0 out"
This example installs the drivers for a port 0x0278, with pins 2 to 9 as outputs (by default, since neither in nor out is specified), a port 0x0378, with pins 2 to 9 as inputs and a 0x20A0 port, with pins 2 to 9 explicitly specified as outputs. Note that you must know the base address of the parallel ports to configure the drivers correctly. For ISA bus ports, this is usually not a problem, since the ports are almost always at a well-known address, such as 0x278 or 0x378 which are typically configured in the BIOS. The addresses of PCI bus cards are usually found with lspci -v in an I/O ports line, or in a kernel message after running sudo modprobe -a parport_pc. There is no default address, so if <config-string> does not contain at least one address, it is an error.
For each parallel port handled by the hal_parport driver, a type can optionally be specified. The type is one of in, out, epp, or x.
| Pin | in | out/epp | x |
|---|---|---|---|
1 |
out |
out |
in |
2 |
in |
out |
out |
3 |
in |
out |
out |
4 |
in |
out |
out |
5 |
in |
out |
out |
6 |
in |
out |
out |
7 |
in |
out |
out |
8 |
in |
out |
out |
9 |
in |
out |
out |
10 |
in |
in |
in |
11 |
in |
in |
in |
12 |
in |
in |
in |
13 |
in |
in |
in |
14 |
out |
out |
in |
15 |
in |
in |
in |
16 |
out |
out |
in |
17 |
out |
out |
in |
If the type is not specified, the default is out.
A type of epp is the same as out, but the hal_parport driver requests that the port switch into EPP mode. The hal_parport driver does not use the EPP bus protocol, but on some systems EPP mode changes the electrical characteristics of the port in a way that may make some marginal hardware work better. The Gecko G540’s charge pump is known to require this on some parallel ports.
See the Note above about mode x.
This will enable two system-detected parallel ports, the first in output mode and the second in input mode:
loadrt hal_parport cfg="0 out 1 in"
You must also direct LinuxCNC to run the read and write functions.
addf parport.0.read base-thread addf parport.0.write base-thread
2. PCI Port Address
One good PCI parport card is made with the Netmos 9815 chipset. It has good +5 V signals, and can come in a single or dual ports.
To find the I/O addresses for PCI cards open a terminal window and use the list pci command:
lspci -vLook for the entry with "Netmos" in it. Example of a 2-port card:
0000:01:0a.0 Communication controller: \
Netmos Technology PCI 9815 Multi-I/O Controller (rev 01)
Subsystem: LSI Logic / Symbios Logic 2POS (2 port parallel adapter)
Flags: medium devsel, IRQ 5
I/O ports at b800 [size=8]
I/O ports at bc00 [size=8]
I/O ports at c000 [size=8]
I/O ports at c400 [size=8]
I/O ports at c800 [size=8]
I/O ports at cc00 [size=16]From experimentation, I’ve found the first port (the on-card port) uses the third address listed (c000), and the second port (the one that attaches with a ribbon cable) uses the first address listed (b800). The following example shows the onboard parallel port and a PCI parallel port using the default out direction.
loadrt hal_parport cfg="0x378 0xc000"
Please note that your values will differ. The Netmos cards are Plug-N-Play, and might change their settings depending on which slot you put them into, so if you like to get under the hood and re-arrange things, be sure to check these values before you start LinuxCNC.
3. Pins
-
parport.<p>.pin-`__<n>__-out` (bit) Drives a physical output pin. -
parport.<p>.pin-`__<n>__-in` (bit) Tracks a physical input pin. -
parport.<p>.pin-`__<n>__-in-not` (bit) Tracks a physical input pin, but inverted.
For each pin, <p> is the port number, and <n> is the physical pin number in the 25 pin D-shell connector.
For each physical output pin, the driver creates a single HAL pin, for example: parport.0.pin-14-out.
For each physical input pin, the driver creates two HAL pins, for example: parport.0.pin-12-in and parport.0.pin-12-in-not.
The -in HAL pin is TRUE if the physical pin is high, and FALSE if the physical pin is low. The -in-not HAL pin is inverted and is FALSE if the physical pin is high.
4. Parameters
-
parport.`__<p>__.pin-__<n>__-out-invert` (bit) Inverts an output pin. -
parport.`__<p>__.pin-__<n>__-out-reset` (bit) (only for-outpins) TRUE if this pin should be reset when the-resetfunction is executed. -
parport.`__<p>__.reset-time` (U32) The time (in nanoseconds) between a pin is set by-writeand reset by the-resetfunction if it is enabled.
The -invert parameter determines whether an output pin is active high or active low. If -invert is FALSE, setting the HAL -out pin TRUE drives the physical pin high, and FALSE drives it low. If -invert is TRUE, then setting the HAL -out pin TRUE will drive the physical pin low.
5. Functions
-
parport.`__<p>__.read` (funct) Reads physical input pins of port number <p> and updates HAL-inand-in-notpins. -
parport.read-all(funct) Reads physical input pins of all ports and updates HAL-inand-in-notpins. -
parport.`__<p>__.write` (funct) Reads HAL-outpins of port number <p> and updates that port’s physical output pins. -
parport.write-all(funct) Reads HAL-outpins of all ports and updates all physical output pins. -
parport.`__<p>__.reset` (funct) Waits untilreset-timehas elapsed since the associatedwrite, then resets pins to values indicated by-out-invertand-out-invertsettings.resetmust be later in the same thread aswrite. If-resetis TRUE, then theresetfunction will set the pin to the value of-out-invert. This can be used in conjunction with stepgen’s doublefreq to produce one step per period. The stepgen stepspace for that pin must be set to 0 to enable doublefreq.
The individual functions are provided for situations where one port needs to be updated in a very fast thread, but other ports can be updated in a slower thread to save CPU time. It is probably not a good idea to use both an -all function and an individual function at the same time.
6. Common problems
If loading the module reports
insmod: error inserting '/home/jepler/emc2/rtlib/hal_parport.ko':
-1 Device or resource busythen ensure that the standard kernel module parport_pc is not loaded
[In the LinuxCNC packages for Ubuntu, the file /etc/modprobe.d/emc2 generally prevents parport_pc from being automatically loaded.]
and that no other device in the system has claimed the I/O ports.
If the module loads but does not appear to function, then the port address is incorrect.
7. Using DoubleStep
To setup DoubleStep on the parallel port you must add the function parport.n.reset after parport.n.write and configure stepspace to 0 and the reset time wanted. So that step can be asserted on every period in HAL and then toggled off by parport after being asserted for time specified by parport.`__n__.reset-time`.
For example:
loadrt hal_parport cfg="0x378 out" setp parport.0.reset-time 5000 loadrt stepgen step_type=0,0,0 addf parport.0.read base-thread addf stepgen.make-pulses base-thread addf parport.0.write base-thread addf parport.0.reset base-thread addf stepgen.capture-position servo-thread ... setp stepgen.0.steplen 1 setp stepgen.0.stepspace 0
More information on DoubleStep can be found on the wiki.
8. probe_parport
In today’s PCs, parallel ports may require a plug and play (PNP) configuration before they can be used. The kernel module probe_parport configures all PNP ports present. It must be loaded before hal_parport. On machines without a PNP port, it can be loaded but will have no effect.
8.1. Installing probe_parport
If, when parport_pc kernel module is loaded with command:
sudo modprobe -a parport_pc; sudo rmmod parport_pcLinux kernel outputs a message similar to:
parport: PnPBIOS parport detected.Then use of this module will probably be necessary.
Finally, HAL parport components should be loaded:
loadrt probe_parport loadrt hal_parport ...