
1. Übersicht
Die Referenzfahrt legt den Nullpunkt der G53-Maschinenkoordinaten fest. Softlimits werden relativ zum Maschinenursprung definiert. Eine korrekt konfigurierte und funktionierende Maschine bewegt sich nicht über die Soft(ware)-Grenzen hinaus und der Maschinenursprung ist so wiederholbar eingestellt wie der Referenzschalter/Indexmechanismus. Linuxcnc kann mit dem Auge (Ausrichtungsmarken), mit Schaltern, mit Schaltern und einem Encoder-Index oder mit Absolut-Encodern ausgerichtet werden. Homing scheint einfach genug - bewegen Sie einfach jedes Gelenk zu einer bekannten Position, und stellen Sie LinuxCNC’s interne Variablen entsprechend. Allerdings haben verschiedene Maschinen unterschiedliche Anforderungen, und Homing ist eigentlich ziemlich kompliziert.
|
Note
|
Es ist zwar möglich, LinuxCNC ohne Referenzschalter/Referenzfahrt oder Endschalter zu verwenden, aber die zusätzliche Sicherheit der Softlimits wird dadurch zunichte gemacht. |
2. Voraussetzung
Die Durchführung der Referenzfahrt (engl. homing) beruht auf einigen grundlegenden Annahmen zur Maschine.
-
Die negativen und positiven Richtungen basieren auf Tool Movement, die sich von der tatsächlichen Maschinenbewegung unterscheiden können. Z.B. bewegt sich bei einer Fräsmaschine typischerweise der Tisch und nicht das Werkzeug.
-
Alles wird vom Nullpunkt der G53-Maschine aus referenziert, der Ursprung kann überall liegen (auch außerhalb, wo man sich bewegen kann)
-
Der Nullpunkt der G53-Maschine liegt in der Regel innerhalb des Bereichs der weichen Grenzen, aber nicht zwingend.
-
Der Offset des Referenzschalters legt fest, wo sich der Ursprung befindet, aber auch er wird vom Ursprung aus referenziert.
-
Bei der Referenzfahrt mit Encoder-Index wird der Offset des Referenzschalters aus der Encoder-Referenzposition berechnet, nachdem der Referenzschalter ausgelöst wurde.
-
Die negativen Soft(ware)-Grenzen sind das Maximum, das Sie nach der Referenzfahrt in negativer Richtung bewegen können. (aber sie sind nicht unbedingt negativ im absoluten Sinne)
-
Die positiven Soft(ware)-Grenzen sind die maximale Bewegung, die Sie nach der Referenzfahrt in positiver Richtung ausführen können. (Sie sind jedoch nicht unbedingt positiv im absoluten Sinne, obwohl es üblich ist, sie als positive Zahl festzulegen)
-
Soft(ware)-Grenzwerte befinden sich innerhalb des Endschalterbereichs.
-
(Endgültige) Referenzpunktposition liegt innerhalb des weichen (engl. soft) Grenzbereichs
-
(Bei Verwendung einer schalterbasierten Referenzfahrt nutzen die Referenzschalter entweder die Endschalter (gemeinsame Referenzfahrt-/Endschalter) oder befinden sich bei Verwendung eines separaten Referenzschalters im Bereich der Endschalter.
-
Bei Verwendung eines separaten Referenzschalters ist es möglich, die Referenzfahrt auf der falschen Seite des Referenzschalters zu starten, was in Verbindung mit der Option HOME_IGNORE_LIMITS zu einem harten Absturz führen kann. Sie können dies vermeiden, indem Sie den Home-Schalter so einstellen, dass er seinen Zustand umschaltet, wenn sich die auslösende Antriebsklaue auf einer bestimmten Seite befindet, bis sie den Auslöse-Punkt wieder passiert hat. Anders ausgedrückt: Der Zustand des Home-Schalters muss die Position der Antriebsklaue relativ zum Schalter repräsentieren (d.h. vor oder nach dem Schalter), und er muss so bleiben, auch wenn die Klaue in der gleichen Richtung am Schalter vorbeiläuft.
|
Note
|
Es ist zwar möglich, LinuxCNC mit dem G53-Maschinenursprung außerhalb der weichen Maschinengrenzen zu verwenden, aber wenn Sie G28 oder G30 verwenden, ohne die Parameter einzustellen, geht es standardmäßig zum Ursprung. Dadurch würden die Endschalter ausgelöst, bevor die Position erreicht wird. |
3. Separater Home-Schalter Beispiel-Layout
Dieses Beispiel zeigt minimale und maximale Endschalter mit einem separaten Home-Schalter.
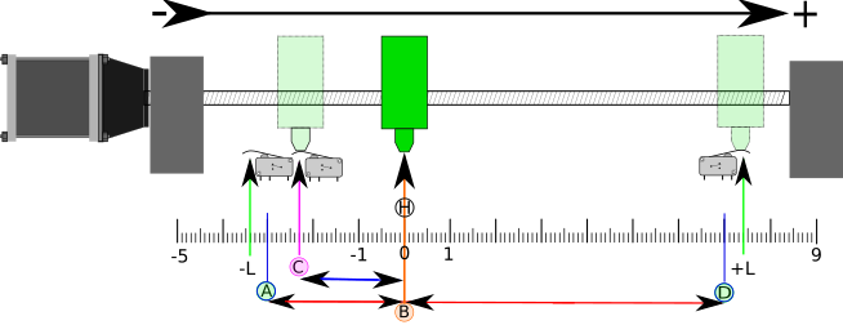
-
A ist die negative weiche Grenze
-
B ist die Koordinate der G53-Maschinen-Ursprung
-
C ist der Auslösepunkt des Referenzschalters
-
D ist die positive weiche Grenze
-
H ist die finale Ausgangsposition (HOME) = 0 Einheiten
-
Die -L und +L sind die Auslösepunkte der Endschalter
-
A<→B ist die negative weiche Grenze (MIN_LIMITS) = -3 Einheiten
-
B<→C ist der Home_Offset (HOME_OFFSET) = -2,3 Einheiten
-
B<→D ist die positive weiche Grenze (MAX_LIMITS) = 7 Einheiten
-
A<→D ist der gesamte Weg = 10 Einheiten
-
Der Abstand zwischen den Endschaltern und Soft Limits (-L<→A und D←+L) wird in diesem Beispiel vergrößert
-
Beachten Sie, dass zwischen den Endschaltern und dem tatsächlichen harten Kontakt für den Auslauf nach der Deaktivierung des Verstärkers ein Abstand besteht.
|
Note
|
Die Referenzfahrt legt das G53-Koordinatensystem fest. Der Maschinenursprung (Nullpunkt) kann an einer beliebigen Stelle liegen, aber wenn Sie den Nullpunkt auf die negative weiche Grenze setzen, werden alle G53-Koordinaten positiv, was wahrscheinlich am einfachsten zu merken ist. Dazu setzen Sie MIN_LIMIT = 0 und stellen sicher, dass MAX_LIMIT positiv ist. |
4. Gemeinsamer End-/Hauptschalter Beispiel-Layout
Dieses Beispiel zeigt einen maximalen Endschalter und einen kombinierten minimalen End-/Referenzschalter.
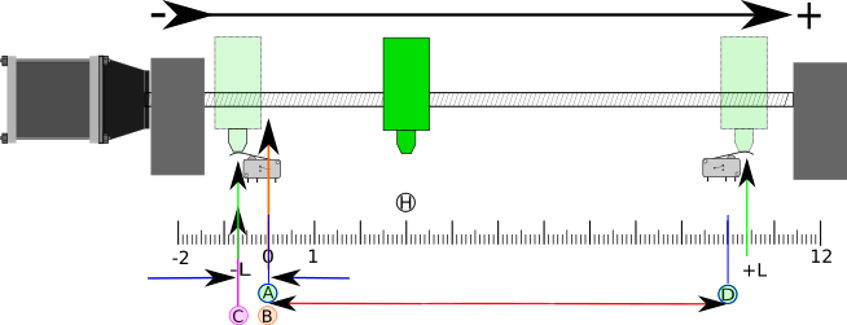
-
A ist die negative weiche Grenze.
-
B ist die Koordinate der G53-Maschinen-Ursprung.
-
C ist der Auslösepunkt des Referenzschalters, der gemeinsam mit dem (-L) minimalen Grenzwertauslöser verwendet wird.
-
D ist die positive weiche Grenze.
-
H ist die endgültige Ausgangsposition (HOME) = 3 Einheiten.
-
Die -L und +L sind die Auslösepunkte der Endschalter.
-
A<→B ist die negative weiche Grenze (MIN_LIMITS) = 0 Einheiten.
-
B<→C ist der Home_Offset (HOME_OFFSET) = -0,7 Einheiten.
-
B<→D ist die positive weiche Grenze (MAX_LIMITS) 10 Einheiten.
-
A<→D ist der gesamte Weg = 10 Einheiten.
-
Der Abstand zwischen den Endschaltern und den Soft Limits (-L<→A und D<→+L) wird in diesem Beispiel vergrößert.
-
Beachten Sie, dass zwischen den Endschaltern und dem tatsächlichen harten Kontakt für den Auslauf nach der Deaktivierung des Verstärkers ein Abstand besteht.
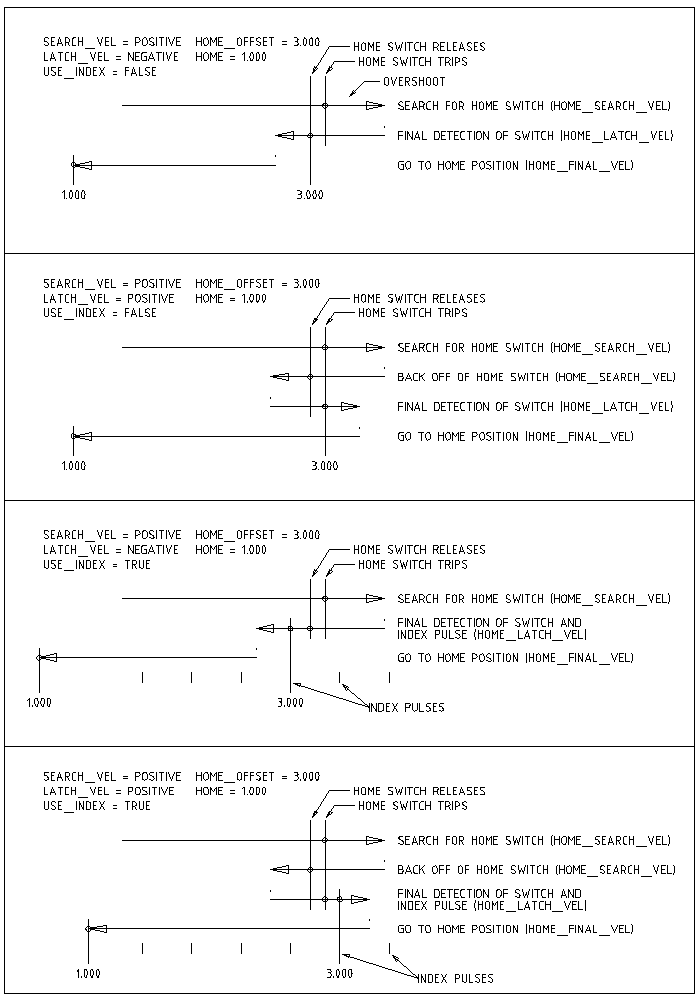
5. Referenzfahrt Abfolge
Es gibt vier mögliche Referenzfahrt-Abfolgen, die durch das Vorzeichen von HOME_SEARCH_VEL und HOME_LATCH_VEL sowie die zugehörigen Konfigurationsparameter definiert sind, wie in der folgenden Tabelle dargestellt. Es gibt zwei wesentliche Varianten: HOME_SEARCH_VEL und HOME_LATCH_VEL haben das gleiche Vorzeichen oder sie haben entgegengesetzte Vorzeichen. Eine genauere Beschreibung der Funktionen der einzelnen Konfigurationsparameter finden Sie im folgenden Abschnitt.
6. Konfiguration
Im Folgenden wird genau festgelegt, wie sich die Stammfolge verhält. Sie werden in einem [JOINT_n]-Abschnitt der INI-Datei definiert.
| Referenzfahrt Typ | HOME_SEARCH_VEL | HOME_LATCH_VEL | HOME_USE_INDEX |
|---|---|---|---|
Unmittelbar |
0 |
0 |
NO |
Nur-Index |
0 |
ungleich Null |
YES |
Nur Schalter |
ungleich Null |
ungleich Null |
NO |
Schalter und Index |
ungleich Null |
ungleich Null |
YES |
|
Note
|
Alle anderen Kombinationen können zu einem Fehler führen. |
6.1. HOME_SEARCH_VEL
This variable has units of machine-units per second.
Der Standardwert ist Null. Ein Wert von Null bewirkt, dass LinuxCNC davon ausgeht, dass es keine Home-Schalter gibt; die Suche Phase der Referenzfahrt wird übersprungen.
Wenn HOME_SEARCH_VEL ungleich Null ist, dann nimmt LinuxCNC an, dass es einen Referenzschalter (engl. home switch) gibt. Es beginnt mit der Überprüfung, ob der Referenzschalter bereits ausgelöst hat. Wenn dies der Fall ist, wird der Schalter bei HOME_SEARCH_VEL zurückgesetzt. Die Richtung des Zurückfahrens ist entgegengesetzt dem Vorzeichen von HOME_SEARCH_VEL. Anschließend wird der Schalter in der durch das Vorzeichen von HOME_SEARCH_VEL festgelegten Richtung mit einer durch den Absolutwert bestimmten Geschwindigkeit gesucht. Wenn der Referenzschalter erkannt wird, hält das Gelenk so schnell wie möglich an, wobei jedoch immer ein gewisses Überschwingen auftritt. Das Ausmaß des Überschwingens hängt von der Geschwindigkeit ab. Ist sie zu hoch, kann das Gelenk so weit überschwingen, dass es gegen einen Endschalter stößt oder gegen das Ende des Verfahrwegs prallt. Ist HOME_SEARCH_VEL hingegen zu niedrig, kann die Referenzfahrt sehr lange dauern.
6.2. HOME_LATCH_VEL
This variable has units of machine-units per second.
Legt die Geschwindigkeit und Richtung, die LinuxCNC verwendet, wenn es seine endgültige genaue Bestimmung der Home-Schalter (falls vorhanden) und Index-Impuls Lage (falls vorhanden) macht. Es wird in der Regel langsamer als die Suchgeschwindigkeit sein, um die Genauigkeit zu maximieren. Wenn HOME_SEARCH_VEL und HOME_LATCH_VEL das gleiche Vorzeichen haben, dann wird die Latch-Phase durchgeführt, während man sich in die gleiche Richtung wie die Suchphase bewegt. (In diesem Fall fährt LinuxCNC zunächst vom Schalter zurück, bevor es sich mit der Verriegelungsgeschwindigkeit wieder auf ihn zubewegt). Wenn HOME_SEARCH_VEL und HOME_LATCH_VEL entgegengesetzte Vorzeichen haben, wird die Latch-Phase durchgeführt, während man sich in die entgegengesetzte Richtung der Suchphase bewegt. Das bedeutet, dass LinuxCNC den ersten Impuls einrastet, nachdem es den Schalter verlassen hat. Wenn HOME_SEARCH_VEL gleich Null ist (d.h. es gibt keinen Home-Schalter), und dieser Parameter ungleich Null ist, geht LinuxCNC zur Index-Impuls-Suche über. Wenn HOME_SEARCH_VEL nicht Null ist und dieser Parameter ist auf Null gesetzt, so ist es ein Fehler und die Referenzfahrt wird entsprechend fehlschlagen. Der Standardwert ist Null.
6.3. HOME_FINAL_VEL
Diese Variable hat die Einheit von Maschineneinheiten pro Sekunde.
Sie gibt die Geschwindigkeit an, die LinuxCNC verwendet, wenn es seine Bewegung von HOME_OFFSET zur HOME-Position durchführt. Wenn die HOME_FINAL_VEL in der INI-Datei fehlt, dann wird die maximale Gelenkgeschwindigkeit verwendet, um diese Bewegung zu machen. Der Wert muss eine positive Zahl sein.
6.4. HOME_IGNORE_LIMITS
Can hold the values YES / NO. The default value for this parameter is NO. This flag determines whether LinuxCNC will ignore the limit switch input for this joint while homing. This setting will not ignore limit inputs for other joints. If you do not have a separate home switch set this to YES and connect the limit switch signal to the joint home switch input in HAL. LinuxCNC will ignore the limit switch input for this joint while homing. To use only one input for all homing and limits you will have to block the limit signals of the joints not homing in HAL and home one joint at a time.
6.5. HOME_USE_INDEX
Specifies whether or not there is an index pulse. If the flag is true (HOME_USE_INDEX = YES), LinuxCNC will latch on the rising edge of the index pulse. If false, LinuxCNC will latch on either the rising or falling edge of the home switch (depending on the signs of HOME_SEARCH_VEL and HOME_LATCH_VEL). The default value is NO.
|
Note
|
HOME_USE_INDEX erfordert Verbindungen in Ihrer HAL-Datei zu joint.n.index-enable vom encoder.n.index-enable.
|
6.6. HOME_INDEX_NO_ENCODER_RESET
Default is NO. Use YES if the encoder used for this joint does not reset its counter when an index pulse is detected after assertion of the joint index_enable HAL pin. Applicable only for HOME_USE_INDEX = YES.
6.7. HOME_OFFSET
This defines the location of the origin zero point of the G53 machine coordinate system. It is the distance (offset), in joint units, from the machine origin to the home switch trip point or index pulse. After detecting the switch trip point/index pulse, LinuxCNC sets the joint coordinate position to HOME_OFFSET, thus defining the origin, which the soft limits references from. The default value is zero.
|
Note
|
Die Position des Referenzschalters, die durch die Variable HOME_OFFSET angegeben wird, kann innerhalb oder außerhalb der Soft Limits liegen. Sie werden gemeinsam mit oder innerhalb der harten Endschalter verwendet. |
6.8. HOME
The position that the joint will go to upon completion of the homing sequence. After detecting the home switch or home switch then index pulse (depending on configuration), and setting the coordinate of that point to HOME_OFFSET, LinuxCNC makes a move to HOME as the final step of the homing process. The default value is zero. Note that even if this parameter is the same as HOME_OFFSET, the joint will slightly overshoot the latched position as it stops. Therefore there will always be a small move at this time (unless HOME_SEARCH_VEL is zero, and the entire search/latch stage was skipped). This final move will be made at the joint’s maximum velocity unless HOME_FINAL_VEL has been set.
|
Note
|
Der Unterschied zwischen HOME_OFFSET und HOME besteht darin, dass HOME_OFFSET zunächst die Ursprungsposition und den Maßstab auf der Maschine festlegt, indem der HOME_OFFSET -Wert auf die Position angewendet wird, an der die Ausgangsposition gefunden wurde, und dann HOME angibt, wohin sich das Gelenk auf diesem Maßstab bewegen soll. |
6.9. HOME_IS_SHARED
If there is not a separate home switch input for this joint, but a number of momentary switches wired to the same pin, set this value to 1 to prevent homing from starting if one of the shared switches is already closed. Set this value to 0 to permit homing even if the switch is already closed.
6.10. HOME_ABSOLUTE_ENCODER
Use for absolute encoders. When a request is made to home the joint, the current joint position is set to the [JOINT_n]HOME_OFFSET value.
Die abschließende Bewegung zur [JOINT_n]HOME Position ist entsprechend der HOME_ABSOLUTE_ENCODER Einstellung optional:
HOME_ABSOLUTE_ENCODER = 0 (Standard) Gelenk verwendet keinen Absolutwertgeber HOME_ABSOLUTE_ENCODER = 1 Absolutwertgeber, endgültige Bewegung zu [JOINT_n]HOME HOME_ABSOLUTE_ENCODER = 2 Absolutwertgeber, KEINE endgültige Bewegung zu [JOINT_n]HOME
|
Note
|
Eine HOME_IS_SHARED-Einstellung wird stillschweigend ignoriert. |
|
Note
|
Eine Aufforderung, für ein Gelenk die Referenzfahrt zu wiederholen, wird stillschweigend ignoriert. |
6.11. HOME_SEQUENCE
Used to define a multi-joint homing sequence HOME ALL and enforce homing order (e.g., Z may not be homed if X is not yet homed). A joint may be homed after all joints with a lower (absolute value) HOME_SEQUENCE have already been homed and are at the HOME_OFFSET. If two joints have the same HOME_SEQUENCE, they may be homed at the same time.
|
Note
|
Wenn HOME_SEQUENCE nicht angegeben ist, wird das Gelenk nicht durch die HOME ALL-Sequenz referenziert (sondern kann durch einzelne gelenkspezifische Referenzierungsbefehle referenziert werden). |
Die anfängliche HOME_SEQUENCE-Nummer kann 0, 1 (oder -1) sein. Der absolute Wert der Sequenznummern muss um eins erhöht werden - das Überspringen von Sequenznummern wird nicht unterstützt. Wenn eine Sequenznummer weggelassen wird, stoppt HOME ALL die Referenzfahrt nach Abschluss der letzten gültigen Sequenznummer.
Negative HOME_SEQUENCE values indicate that joints in the sequence should synchronize the final move to [JOINT_n]HOME by waiting until all joints in the sequence are ready. If any joint has a negative HOME_SEQUENCE value, then all joints with the same absolute value (positive or negative) of the HOME_SEQUENCE item value will synchronize the final move.
Eine negative HOME_SEQUENCE gilt auch für das Ausführen einer Referenzfahrt eines einzelnen Gelenks. Wenn der HOME_SEQUENCE-Wert negativ ist, werden alle Gelenke, die den gleichen absoluten Wert dieser HOME_SEQUENCE haben, gemeinsam mit einer synchronisierten Endbewegung freigesetzt. Wenn der HOME_SEQUENCE-Wert Null oder positiv ist, wird nur das angegebene Gelenk in die Ausgangsstellung gebracht.
Das manualle Bewegen im "joint mode" von Gelenken mit einer negativen HOME_SEQUENCE ist nicht zulässig. Bei üblichen Portalanwendungen kann ein solches Verfahren zu einer Fehlausrichtung führen (Racking). Beachten Sie, dass das konventionelle Jogging in Weltkoordinaten immer verfügbar ist, sobald eine Maschine referenziert ist.
Beispiele für ein 3-Gelenk-System
Zwei Sequenzen (0,1), keine Synchronisation
[JOINT_0]HOME_SEQUENCE = 0
[JOINT_1]HOME_SEQUENCE = 1
[JOINT_2]HOME_SEQUENCE = 1Zwei Sequenzen, Gelenke 1 und 2 synchronisiert
[JOINT_0]HOME_SEQUENCE = 0
[JOINT_1]HOME_SEQUENCE = -1
[JOINT_2]HOME_SEQUENCE = -1Bei gemischten positiven und negativen Werten synchronisierten die Gelenke 1 und 2
[JOINT_0]HOME_SEQUENCE = 0
[JOINT_1]HOME_SEQUENCE = -1
[JOINT_2]HOME_SEQUENCE = 1Eine Sequenz, keine Synchronisation
[JOINT_0]HOME_SEQUENCE = 0
[JOINT_1]HOME_SEQUENCE = 0
[JOINT_2]HOME_SEQUENCE = 0Eine Sequenz, alle Gelenke synchronisiert
[JOINT_0]HOME_SEQUENCE = -1
[JOINT_1]HOME_SEQUENCE = -1
[JOINT_2]HOME_SEQUENCE = -16.12. VOLATILE_HOME
If this setting is true, this joint becomes unhomed whenever the machine transitions into the OFF state. This is appropriate for any joint that does not maintain position when the joint drive is off. Some stepper drives, especially microstep drives, may need this.
6.13. LOCKING_INDEXER
If this joint is a locking rotary indexer, it will unlock before homing, and lock afterward.
6.14. Unmittelbare Referenzfahrt
If a joint does not have home switches or does not have a logical home position like a rotary joint and you want that joint to home at the current position when the "Home All" button is pressed in the AXIS GUI, then the following INI entries for that joint are needed.
HOME_SEARCH_VEL = 0 HOME_LATCH_VEL = 0 HOME_USE_INDEX = NO HOME_OFFSET = 0 (oder der Offset der Ausgangsposition (HOME)) HOME_SEQUENCE = 0 (oder eine andere gültige Sequenznummer)
|
Note
|
Die Standardwerte für nicht spezifizierte HOME_SEARCH_VEL, HOME_LATCH_VEL, HOME_USE_INDEX, HOME und HOME_OFFSET sind Null, so dass sie weggelassen werden können, wenn eine sofortige Referenzfahrt angefordert wird. Eine gültige HOME_SEQUENCE-Nummer sollte in der Regel angegeben werden, da das Weglassen einer HOME_SEQUENCE die Verbindung vom HOME ALL-Verhalten ausschließt (siehe oben). |
6.15. Referenzfahrt verhindern
A HAL pin (motion.homing-inhibit) is provided to disallow homing initiation for both "Home All" and individual joint homing.
Einige Systeme nutzen die Bestimmungen für die Synchronisierung der endgültigen Gelenkbewegungen, die werden durch negative [JOINT_N]HOME_SEQUENCE=INI-Dateielemente. Standardmäßig verbieten die Synchronisierungsbestimmungen ein Gelenk-Jogging vor der Referenzfahrt, um ein Gelenk-Jogging zu verhindern, das die Maschine falsch ausrichten könnte (z. B. Portalkreuzung).
Der Systemintegrator kann das Gelenk-Jogging vor der Referenzfahrt mit einer HAL-Logik erlauben, um die [JOINT_N]HOME_SEQUENCE-Elemente umzuschalten. Diese Logik sollte auch den Pin motion.homing-inhibit aktivieren, um sicherzustellen, dass die Referenzfahrt nicht versehentlich eingeleitet wird, wenn der Joint-Jogging-Modus aktiviert ist.
Beispiel: Synchronisierte Gelenke 0,1 mit negativer Sequenz (-1) für synchronisierte Referenzfahrt mit einem Schalter (allow_jjog), der eine positive Sequenz (1) für individuelles Gelenk-Jogging vor der Referenzfahrt wählt (partieller HAL-Code):
loadrt mux2 names=home_sequence_mux
loadrt conv_float_s32 names=heimat_sequenz_s32
setp home_sequenz_mux.in0 -1
setp home_sequenz_mux.in1 1
addf home_sequence_mux servo-thread
addf home_sequence_s32 servo-thread
...
net home_seq_float <= home_sequence_mux.out
net home_seq_float => home_sequence_s32.in
net home_seq_s32 <= home_sequence_s32.out
net home_seq_s32 => ini.0.home_sequence
net home_seq_s32 => ini.1.home_sequence
...
# allow_jjog: von einem virtuellen Bedienfeld oder Hardware-Schalter erzeugter Pin
net hsequence_select <= allow_jog
net hsequence_select => home_sequence_mux.sel
net hsequence_select => motion.homing-inhibit|
Note
|
INI HAL-Pins (wie ini.N.home_sequence) sind nicht verfügbar, bis milltask startet, so dass die Ausführung der oben genannten HAL-Befehle mit Hilfe einer postgui HAL-Datei oder eines verzögerten [APPLICATION]APP=-Skripts verschoben werden sollte. |
|
Note
|
Für die Echtzeitsynchronisation des Gelenk-Joggings für mehrere Gelenke sind zusätzliche HAL-Verbindungen für die Jog-Pins vom Typ Manual-Pulse-Generator (MPG) erforderlich (joint.N.enable, joint.N.scale, joint.N.counts).
|
Eine Beispielsimulationskonfiguration (gantry_jjog.ini), die das Joggen der Gelenke bei Verwendung negativer Nullpunktsequenzen demonstriert, befindet sich im Verzeichnis: configs/sim/axis/gantry/.