1. Introducción
Cuando hablamos de máquinas CNC, solemos pensar en máquinas que se les ordena moverse a ciertas ubicaciones y realizar varias tareas. Para tener una vista unificada del espacio de la máquina, y para adaptarlo al punto de vista humano del espacio 3D, la mayoría de las máquinas (si no todas) usan un sistema de coordenadas común llamado Sistema de Coordenadas Cartesianas.
El sistema de coordenadas cartesianas se compone de tres ejes (X, Y, Z) cada uno
perpendicular a los otros dos.
[La palabra "eje" es comúnmente
(y erróneamente) usada cuando se habla de máquinas CNC, y se refieren a las direcciones de movimiento de la máquina]
.
Cuando hablamos de un programa de código G (RS274/NGC) hablamos de un conjunto
de comandos (G0, G1, etc.) que tienen posiciones cartesianas como parámetros (X- Y-
Z-). Estas posiciones se refieren exactamente a las posiciones cartesianas. Parte del
controlador de movimiento LinuxCNC es responsable de traducir esas posiciones
en posiciones que corresponden a la Cinemática de la máquina.
[Cinemática: una función bidireccional para transformar del espacio cartesiano al espacio de articulaciones]
1.1. Articulaciones vs. Ejes
Una articulacion de una máquina CNC es uno de los grados físicos de libertad de la máquina. Este podría ser lineal (tornillos de avance) o rotativo (mesas rotativas, articulaciones de brazo de robot). Puede haber cualquier cantidad de articulaciones en una máquina dada. Por ejemplo, un brazo robot tipico tiene 6 articulaciones, y una fresadora simple típica tiene solo 3.
Hay ciertas máquinas donde las articulacions se disponen para que coincidan con los ejes cinemáticos (articulación 0 a lo largo del eje X, articulación 1 a lo largo del eje Y, articulación 2 a lo largo del eje Z); a estas máquinas se les llama Máquinas cartesianas (o máquinas con Cinemática Trivial). Estas son las máquinas más comunes utilizadas en el fresado, pero no son muy comunes en otros dominios (por ejemplo, soldadura: robots de tipo puma).
LinuxCNC admite nueve ejes con nombres: X Y Z A B C U V W. Los ejes X Y Z típicamente se refieren a las coordenadas cartesianas habituales. Los ejes A B C se refieren a coordenadas de rotación sobre los ejes X Y Z respectivamente. Los ejes U V W se refieren a coordenadas adicionales que comúnmente se hacen colineales a los ejes X Y Z respectivamente.
2. Cinemática Trivial
Las máquinas más simples son aquellas en las que se coloca cada articulación a lo largo de uno de los ejes cartesianos. En estas máquinas, el mapeo de espacio cartesiano (el programa de código G) al espacio de articulaciones (los actuadores de la máquina) es trivial. Es un mapeo simple 1:1.
pos->tran.x = joints[0];
pos->tran.y = joints[1];
pos->tran.z = joints[2];En el fragmento de código de arriba se puede ver cómo se hace la asignación; la posición X es idéntica a la articulación 0, la posición Y a la de articulación 1, etc. Lo anterior se refiere a la cinemática directa (una dirección de la transformación). El siguiente fragmento de código se refiere a la cinemática inversa (o dirección inversa de la transformación):
joints[0] = pos->tran.x;
joints[1] = pos->tran.y;
joints[2] = pos->tran.z;En LinuxCNC, la cinemática de identidad (1:1) se implementa con el módulo cinemático trivkins extendido a 9 ejes. El valor por defecto de las relaciones entre las coordenadas del eje y los números de articulaciones son:
pos->tran.x = joints[0];
pos->tran.y = joints[1];
pos->tran.z = joints[2];
pos->a = joints[3];
pos->b = joints[4];
pos->c = joints[5];
pos->u = joints[6];
pos->v = joints[7];
pos->w = joints[8];Del mismo modo, las relaciones predeterminadas para la cinemática inversa para trivkins son:
joints[0] = pos->tran.x;
joints[1] = pos->tran.y;
joints[2] = pos->tran.z;
joints[3] = pos->a;
joints[4] = pos->b;
joints[5] = pos->c;
joints[6] = pos->u;
joints[7] = pos->v;
joints[8] = pos->w;Es sencillo hacer la transformación para cinematica trivial (cinemática trivkins) o máquina cartesiana siempre que no haya omisiones en las letras de eje usadas.
Si a la máquina le falta una o más de las letras de eje, se vuelve un poco más complicado. Los problemas de las letras de eje omitidas se tratan utilizando el parámetro coordinates= con el módulo trivkins. Los números de articulaciones son asignados consecutivamente a cada coordenada especificada. Se puede describir un torno con coordinates=xz Las asignaciones de articulacions serán entonces:
joints[0] = pos->tran.x
joints[1] = pos->tran.zSe recomienda el uso del parámetro coordinates= para configuraciones que omiten
letras del eje.
[Históricamente, el módulo trivkins no contemplaba el
parámetro coordinates= por lo que las configuraciones de torno a menudo se configuraran como
máquinas XYZ. El eje Y no utilizado se configuró para que 1) hiciera home inmediatamente, 2) usara un
lazo de realimentacion simple para conectar su pin HAL de comando de posición Hal a su pin HAL
de retroalimentacion de posición, y 3) estaba oculto en las GUI de pantalla.
Numerosas configuraciones sim usaron estos métodos para compartir archivos hal comunes.]
El módulo cinemático trivkins también permite especificar la misma coordenada para más de una articulación. Esta característica puede ser útil en máquinas como un pórtico de dos motores independientes para la coordenada y. Tal máquina podría usar coordenadas=xyyz que da como resultado asignaciones de articulaciones:
joints[0] = pos->tran.x
joints[1] = pos->tran.y
joints[2] = pos->tran.y
joints[3] = pos->tran.zConsulte la página man de trivkins para obtener más información.
3. Cinemática no trivial
Puede haber bastantes tipos de configuraciones de máquina (robots: puma, scara; hexápodos, etc.). Cada uno de ellos se configura utilizando articulacions lineales y giratorias. Estas articulaciones generalmente no coinciden con las coordenadas cartesianas y, por lo tanto, necesitamos una función cinemática que haga la conversión (en realidad 2 funciones: cinemática directa e inversa).
Para ilustrar lo anterior, analizaremos una maquina de cinemática simple llamada bípode (una versión simplificada del trípode, que es una version simplificada del hexápodo).
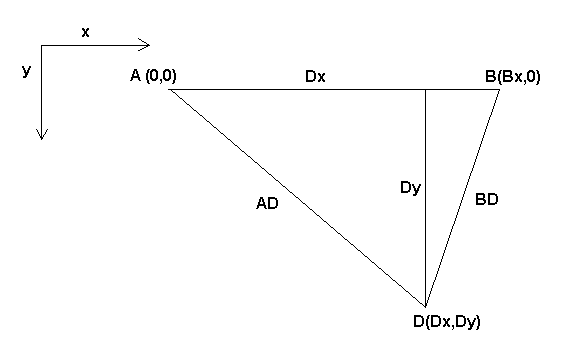
El Bipod del que estamos hablando es un dispositivo que consta de 2 motores colocado en una pared, de la cual cuelga un dispositivo usando un cable. Las articulaciones en este caso son las distancias desde los motores al dispositivo (llamadas AD y BD en la figura).
La posición de los motores está fijada por convención. El motor A está en (0,0), lo que significa que su coordenada X es 0, y su coordenada Y es también 0. El motor B se coloca en (Bx, 0), lo que significa que su coordenada X es Bx (y a la misma altura Y que el otro motor).
Nuestra herramienta estará en el punto D que se define por las distancias AD y BD, y por las coordenadas cartesianas Dx, Dy.
El trabajo de la cinemática es transformar a partir de longitudes de articulaciones (AD, BD) a coordenadas cartesianas (Dx, Dy) y viceversa.
3.1. Transformación directa
Para transformar del espacio de articulaciones al espacio cartesiano utilizaremos algunas reglas de trigonometría (los triángulos rectángulos determinados por los puntos (0,0), (Dx, 0), (Dx, Dy) y el triángulo (Dx, 0), (Bx, 0) y (Dx, Dy).
Podemos ver fácilmente que:

asi como:

Si restamos una de la otra obtendremos:

y por lo tanto:
A partir de ahí calculamos:

Tenga en cuenta que el cálculo para y implica la raíz cuadrada de una diferencia, que puede dar como resultado un número no real. Si no hay una sola coordenada cartesiana para esta posición de articulacion, la posición se dice que es una singularidad. En este caso, la cinemática directa retorna -1.
Traducido al código actual:
double AD2 = joints[0] * joints[0];
double BD2 = joints[1] * joints[1];
double x = (AD2 - BD2 + Bx * Bx) / (2 * Bx);
double y2 = AD2 - x * x;
if(y2 < 0) return -1;
pos->tran.x = x;
pos->tran.y = sqrt(y2);
return 0;3.2. Transformación inversa
La cinemática inversa es mucho más fácil en nuestro ejemplo, ya que podemos escribir directamente


o traducido al código real:
double x2 = pos->tran.x * pos->tran.x;
double y2 = pos->tran.y * pos->tran.y;
joints[0] = sqrt(x2 + y2);
joints[1] = sqrt((Bx - pos->tran.x)*(Bx - pos->tran.x) + y2);
return 0;4. Detalles de implementación
Un módulo cinemático se implementa como un componente HAL, y tiene permitido exportar pines y parámetros. Consiste en varias funciones "C" (a diferencia de las funciones HAL):
int kinematicsForward(const double *joint, EmcPose *world,
const KINEMATICS_FORWARD_FLAGS *fflags,
KINEMATICS_INVERSE_FLAGS *iflags)Implementa la función cinemática directa.
int kinematicsInverse(const EmcPose * world, double *joints,
const KINEMATICS_INVERSE_FLAGS *iflags,
KINEMATICS_FORWARD_FLAGS *fflags)Implementa la función cinemática inversa.
KINEMATICS_TYPE kinematicsType(void)Devuelve el identificador de tipo de cinemática, típicamente KINEMATICS_BOTH.
int kinematicsHome(EmcPose *world, double *joint,
KINEMATICS_FORWARD_FLAGS *fflags,
KINEMATICS_INVERSE_FLAGS *iflags)La función cinemática home establece todos sus argumentos a valores de la posición home conocida. Cuando se llama, estos deben establecerse, cuando se conocen, a valores iniciales de, por ejemplo, un archivo INI. Si la cinematica de home puede aceptar puntos de partida arbitrarios, estos valores iniciales deberían ser usados.
int rtapi_app_main(void)
void rtapi_app_exit(void)Estas son las funciones estándar de configuración y desmontaje de los módulos RTAPI.
Cuando están contenidos en un solo archivo fuente, los módulos cinemáticos pueden ser compilados e instalados por halcompile. Consulte la página de manual de halcompile(1) o el manual de HAL para más información.