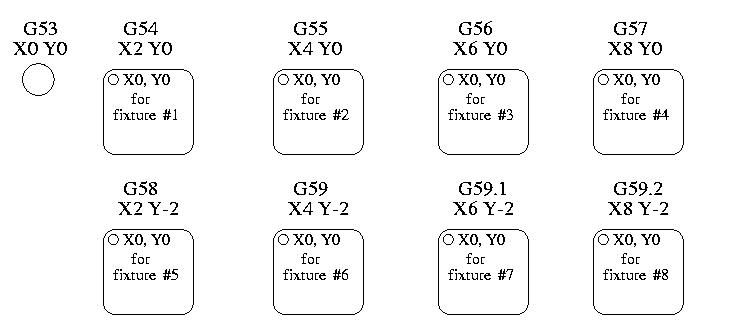
 Figure: Décalages pour 8 ilots
Figure: Décalages pour 8 ilotsVous avez vu comme il est pratique d'utiliser la compensation de longueur d'outil, elle évite au programmeur d'avoir à connaitre en tout temps la hauteur de l'outil quand il écrit un programme. De la même manière, il est très intéressant d'utiliser un point de référence sur le brut ou la pièce et de faire travailler le programme à partir de ce point, sans avoir à tenir compte d'où est placée la pièce sur la machine pendant l'usinage.
Ce chapitre va introduire les décalages et comment ils sont utilisés par EMC. Ce qui inclus:
Indépendamment de tout décalage pouvant être actif, un G53 dans une ligne de code indique à l'interpréteur de se déplacer aux positions réelles des axes (positions absolues), commandées dans la ligne. Par exemple:
G53 G0 X0 Y0 Z0
déplacera le mobile depuis la position actuelle vers la position où les coordonnées machine des trois axes seront à zéro. Vous pouvez utiliser cette commande si vous avez une position fixe pour le changement d'outil ou si votre machine dispose d'un changeur automatique. Vous pouvez aussi utiliser cette commande pour dégager la zone de travail et accéder à la pièce dans l'étau.
G53 est une commande non modale. Elle doit être utilisée sur chaque ligne où un mouvement basé sur les coordonnées machine est souhaité.
Le décalage d'origine est utilisé pour séparer le point de référence de la pièce, de l'origine machine, créant ainsi un système de coordonnées (relatif), propre à chaque pièce et séparé du système de coordonnées machine (absolu). Il permet, entre autre, dans le cas de pièces multiples mais semblables, de créer en décalant ses origine, le système de coordonnées de chaque pièce, le programme restant le même. Un cas typique d'utilisation de cette fonctionnalité, pour usiner huit ilots identiques sur la même pièce est illustré sur la figure [.]
Les valeurs des décalages sont enregistrées dans le fichier VAR qui est requis par le fichier INI durant le démarrage d'EMC. Dans l'exemple ci-dessous qui utilise G55 la valeur de chacun des axes de G55 est enregistrée dans une variable numérotée.
5241 0.000000
5242 0.000000
5243 0.000000
5244 0.000000
5245 0.000000
5246 0.000000
Dans le schéma d'un fichier VAR, la première variable contient la valeur du décalage de l'axe X, la seconde variable le décalage de l'axe Y et ainsi de suite pour les six axes. Il y a une série de variables de ce genre pour chacun des décalages pièce.
Chacune des interfaces graphiques offre un moyen de fixer les valeurs de ces décalages. Vous pouvez également définir ces valeurs en modifiant le fichier VAR lui-même, puis faire un [reset], pour qu' EMC lise les nouvelles valeurs. Pour notre exemple, nous allons éditer directement le fichier pour que G55 prenne les valeurs suivantes:
5241 2.000000
5242 1.000000
5243 -2.000000
5244 0.000000
5245 0.000000
5246 0.000000
Vous pouvez voir que les positions zéro de G55 sont passées en X=2, Y=1 et Z=-2 éloignées donc de l'origine absolue (machine).
Une fois que les valeurs sont assignées, un appel de G55 dans une ligne de programme décalera le point de référence zéro, l'origine, vers les valeurs enregistrées. La ligne suivante décalera chacun des axes vers sa nouvelle position d'origine. Contrairement à G53, les commandes G54 à G59.3 sont modales. Elles agissent sur toutes les lignes de g-code du programme après qu'une ait été rencontrée. Voyons le programme qui pourrait être écrit à l'aide de la figure[.], il suffira d'un seul point de référence pour chacune des pièces pour faire tout le travail. Le code suivant est proposé comme exemple pour faire un rectangle, il utilisera les décalages G55 que nous avons expliqué ci-dessus.
G55 G0 x0 y0 z0
g1 f2 z-0.2000
x1
y1
x0
y0
g0 z0
g54 x0 y0 z0
m2
“Mais,” dites vous, “pourquoi y a-t-il un G54 vers la fin ?” C'est une pratique courante de quitter le système de coordonnées G54 avec l'ensemble des valeurs d'axes à zéro afin de laisser un code modal basé sur les positions machine absolues. Nous le faisons avec cette commande qui met la machine à zéro. Il aurait été possible d'utiliser G53 et d'arriver au même endroit, mais la commande n'aurait pas été modale, les commandes suivantes auraient voulu retourner dans le système de coordonnées du G55 toujours actif.
Une autre variable dans le fichier VAR joue un rôle important dans les décalages, c'est la variable 5220. Dans les fichiers par défaut, sa valeur est fixée à 1,00000. Ce qui signifie que lorsque EMC démarre, il doit utiliser le premier système de coordonnées comme système par défaut. Si vous définissez celui-ci à 9,00000 le neuvième système décalé sera utilisé par défaut au démarrage du système et aux réinitialisations. Toute valeur autre qu'un entier compris entre 1 et 9, ou l'absence de la variable 5220, provoquera au démarrage le retour d'EMC à la valeur par défaut de 1.00000.
La commande G10 L- peut être utilisée pour modifier les valeurs des décalages dans un système de coordonnées. (add here)
G92 est la plus incomprise et la plus maligne des commandes programmables avec EMC. La façon dont elle fonctionne a un peu changé entre les premières versions et l'actuelle. Ces changements ont sans doute déconcerté de nombreux utilisateurs. Elle devrait être vue comme une commande produisant un décalage temporaire, qui s'applique à tous les autres décalages.
En réponse à une critique de cette commande, Ray Henry l'a étudiée en comparant la façon dont les auteurs de l'interpréteur s'attendaient à ce qu'elle fonctionne et la façon dont elle fonctionnait sur sa mini-fraiseuse Grizzly. Dans les paragraphes ci-dessous, entre guillemets, vous trouverez des extraits de son document, disponible sur http://www.linuxcnc.org.
Ce jeu de commandes inclus:
Lorsque les commandes sont utilisées comme décrit ci-dessus, elles fonctionneront à peu près comme vous vous y attendiez.
L'utilisateur doit bien comprendre le fonctionnement des valeurs de g92. Elles sont basées sur l'emplacement de chaque axe au moment où la commande g92 est invoquée. Le document du NIST est clair, `` pour faire en sorte que le point actuel ait les coordonnées'' x0, y0 et z0 nous utiliserons g92 x0 y0 z0. G92 ne fonctionne pas depuis le système de coordonnées machine absolues. Il fonctionne à partir de l'emplacement actuel.
G92 travaille également à partir d'un emplacement actuel déjà modifié par tout autre décalage actif au moment où la commande g92 est invoquée. Lors de test des différences entre les décalages de travail et les décalages réels, il a été constaté qu'un décalage g54 pouvait annuler un g92 et ainsi, donner l'apparence qu'aucun décalage n'était actif. Toutefois, le g92 était toujours actif, pour toutes les coordonnées et il a produit les décalages attendus pour tous les autres systèmes de coordonnées.
Il est probable que l'absence de contact d'origine machine et d'une bonne procédure de prise d'origine machine se traduira par de très grandes erreurs dans l'application des valeurs de g92 si elles existent dans le fichier VAR. Beaucoup d'utilisateurs d'EMC n'ont pas de contact d'origine machine sur leurs machines. Pour eux, l'origine machine devrait être trouvée en déplaçant chaque axe à l'emplacement supposé et en utilisant la commande de prise d'origine. Lorsque chaque axe est dans une position connue, la commande de prise d'origine recalculera comment les valeurs de g92 doivent être appliquées pour produire des résultats cohérents. Sans séquence de prise d'origine machine, les valeurs sont appliquées à la position de la machine au démarrage d'EMC.
Il y a au moins deux façons d'établir les valeurs de G92.
Toutes les deux, fonctionnent depuis l'emplacement courant de l'axe auquel le déplacement doit être appliqué.
Programmer g92 x- y- z- a- b- c- fixe les valeurs des variables de G92 de sorte que chaque axe prenne la valeur associée à son nom. Ces valeurs sont assignées à la position courante des axes. Ces résultats satisfont les paragraphes un et deux du document du NIST.
Les commandes G92 fonctionnent à partir de la position courante de l'axe, à laquelle elles ajoutent ou soustraient des valeurs pour donner à la position courante la valeur assignée par la commande g92. Elles prennent effet même si d'autres décalages sont déjà actifs.
Ainsi, si l'axe X est actuellement en position X=2.0000, un G92 x0 fixera un décalage de -2.0000, de sorte que l'emplacement actuel de X devienne X=0.0000. Un nouveau G92 X5.0000 fixera un décalage de 3.0000 et l'affichage indiquera une position courante X=5.0000.
Maintenant, un G92 X5 fixera un décalage de 0.0000 et l'affichage ne changera pas.
Parfois, les valeurs de décalage d'un G92 restent bloquées dans le fichier VAR. Quand ça arrive, une ré-initialisation ou un redémarrage peut les rendre de nouveau actifs. Les variables sont numérotées
5211 0.000000
5212 0.000000
5213 0.000000
5214 0.000000
5215 0.000000
5216 0.000000
où 5211 est le numéro du décalage de l'axe X et ainsi de suite. Si vous voyez des positions inattendues à la suite d'une commande de déplacement, ou même des chiffres inattendus dans l'affichage de la position lorsque vous démarrez, regardez ces variables dans le fichier VAR pour vérifier si elles contiennent des valeurs. Si c'est le cas, les mettre à zéro devrait solutionner le problème.
Avec ces tests, nous pouvons voir qu'après une réinitialisation, G92 retourne aux conditions qu'il avait au démarrage de l'interpréteur. Le lecteur doit noter que nous avons établi ... qu'aucune de ces valeurs n'est écrite durant un démarrage normal si aucun G92 n'a été fixé au démarrage, aucune ne pourra être lue lors d'un redémarrage.
Il est possible que ce soit le coeur du problème que certains ont vécu avec les différences entre l'ancien et le nouvel interpréteur. C'est possible, mais je laisse le soin à d'autres de faire des essais, pour vérifier que l'ancien interpréteur et les programmes écrivent les variables immédiatement et de constater ensuite que ces valeurs sont lues lors d'un redémarrage.
D'autre part, si les valeurs de G92 existent dans le fichier VAR lorsque EMC a démarré
... À partir d'EMC avec les valeurs de g92 dans le fichier de variables, EMC appliquera ces valeurs à partir de l'emplacement actuel de chaque axe. Si la prise d'origine machine a été faite et que l'origine machine correspond bien au zéro des axes, tout sera correct. Une fois que la prise d'origine a été faite en utilisant les contacts d'origine machine ou en déplaçant chaque axe à une position connue et en appliquant la commande de prise d'origine, les commandes g92 et leurs valeurs fonctionnent comme prévu.
Ces tests n'ont pas étudié l'effet produit par la lecture des variables dans le fichier alors qu'il contient des valeurs. Cela pourrait poser des problèmes si les décalages g92 avaient été enlevés avec g92.1 alors que le fichier de variables contenait encore les valeurs précédentes.
C'est cette complexité qui nous amène à dire que les valeurs de G92 doivent être considérées comme provisoires. Elles devraient être utilisées pour définir des décalages globaux et à court terme. Les commandes de décalage d'origine G54 à 59.3 devraient être utilisées chaque fois que des décalages durables et prévisibles sont nécessaires.
Cet exemple de projet de gravure fraise un jeu de quatre cercles de rayon .1 pouce dans une forme grossière d'étoile au centre du cercle. Nous pouvons configurer individuellement les formes de la façon suivante:
G10 L2 P1 x0 y0 z0 (assure que g54 a mis la machine à zéro)
g0 x-.1 y0 z0
g1 f1 z-.25
g3 x-.1 y0 i.1 j0
g0 z0
m2
Nous pouvons émettre une série de commandes pour créer des décalages pour les quatre autres cercles comme cela.
G10 L2 P2 x0.5 (offsets g55 x value by 0.5 inch)
G10 L2 P3 x-0.5 (offsets g56 x value by -0.5 inch)
G10 L2 P4 y0.5 (offsets g57 y value by 0.5 inch)
G10 L2 P5 y-0.5 (offsets g58 y value by -0.5 inch)
Nous mettons ces ensemble dans le programme suivant.
(Un programme de fraisage de cinq petits cercles dans un losange)
G10 L2 P1 x0 y0 z0 (assure que g54 a mis la machine à zéro)
G10 L2 P2 x0.5 (offsets g55 x value by 0.5 inch)
G10 L2 P3 x-0.5 (offsets g56 x value by -0.5 inch)
G10 L2 P4 y0.5 (offsets g57 y value by 0.5 inch)
G10 L2 P5 y-0.5 (offsets g58 y value by -0.5 inch)
g54 g0 x-.1 y0 z0 (center du cercle)
g1 f1 z-.25
g3 x-.1 y0 i.1 j0
g0 z0
g55 g0 x-.1 y0 z0 (premier décalage circulaire)
g1 f1 z-.25
g3 x-.1 y0 i.1 j0
g0 z0
g56 g0 x-.1 y0 z0 (second décalage circulaire)
g1 f1 z-.25
g3 x-.1 y0 i.1 j0
g0 z0
g57 g0 x-.1 y0 z0 (troisième décalage circulaire)
g1 f1 z-.25
g3 x-.1 y0 i.1 j0
g0 z0
g58 g0 x-.1 y0 z0 (décalage circulaire)
g1 f1 z-.25
g3 x-.1 y0 i.1 j0
g54 g0 x0 y0 z0
m2
Maintenant vient le moment où l'on applique une série de décalages G92 à ce programme. Vous verrez qu'il c'est fait dans chaque cas de z0. Si la machine étaient à la position de zéro, un g92 z1.0000 placé en tête de programme le décalera d'un pouce. Vous pouvez également modifier l'ensemble du dessin dans le plan XY en ajoutant quelques décalages x et y avec g92. Si vous faites cela, vous devez ajouter une commande G92.1 juste avant le m2 qui termine le programme. Si vous ne le faites pas, d'autres programmes que vous pourriez lancer après celui-ci, utiliseront également les décalages g92. En outre, cela permettrait d'éviter d'écrire les valeurs de g92 lorsque vous arrêtez EMC et donc, d'éviter de les recharger quand vous démarrez à nouveau le programme.