This handbook is a work in progress. If you are able to help with writing, editing, or graphic preparation please contact any member of the writing team or join and send an email to emc-users@lists.sourceforge.net.
Copyright (c) 2000-9 LinuxCNC.org
Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version 1.1 or any later version published by the Free Software Foundation; with no Invariant Sections, no Front-Cover Texts, and one Back-Cover Text: "This EMC Handbook is the product of several authors writing for linuxCNC.org. As you find it to be of value in your work, we invite you to contribute to its revision and growth." A copy of the license is included in the section entitled "GNU Free Documentation License". If you do not find the license you may order a copy from Free Software Foundation, Inc. 59 Temple Place, Suite 330 Boston, MA 02111-1307
La configuration minimale pour faire tourner EMC2 sous Ubuntu varie selon l'usage envisagé. Les moteurs pas à pas en général exigent, pour générer leurs trains d'impulsions de pas, des machines plus rapides que les systèmes à servomoteurs. Il est possible de tester le logiciel à partir du CD-Live avant de l'installer sur un ordinateur. Guarder à l'esprit que les valeurs retournées par le test de latence (Latency Test), sont plus importantes que la vitesse du µP pour la génération logicielle des pas. Plus d'informations à propos du test de latence dans la section ([.]).
Autres informations additionnelles sur le Wiki d'EMC2:
http://wiki.linuxcnc.org/cgi-bin/emcinfo.pl?Hardware_Requirements
EMC2 et Ubuntu doivent fonctionner raisonnablement bien sur la configuration matérielle minimale suivante. Ces valeurs ne sont pas des valeurs minimales absolues mais donneront des performances acceptables de la plupart des systèmes à moteurs pas à pas.
Les portables donnent généralement de piètres performances pour les tâches temps réel utilisées pour la génération logicielle de pas. Encore une fois, lancer un test de latence sur une grande période de temps vous permettra de déterminer si le portable envisagé est utilisable ou non.
Si votre installation se termine par un écran avec une résolution de 800 x 600 il est alors probable que Ubuntu n'a pas reconnu votre carte graphique. Les cartes graphiques intégrées aux cartes mères donnent souvent de mauvaises performances temps réel.
Sur le canal IRC d'EMC.
La manière la plus simple d'aller sur IRC est d'utiliser le client Java embarqué sur cette page http://www.linuxcnc.org/content/view/4/8/lang,en/.
Un peu d'éthique sur le canal IRC:
La liste de diffusion des utilisateurs d'EMC2 à https://lists.sourceforge.net/lists/listinfo/emc-users.
Le Wiki d'EMC, site maintenu par les utilisateurs à http://wiki.linuxcnc.org/cgi-bin/emcinfo.pl contient un grand nombre d'informations et d'astuces.
Téléchargez le CD Live depuis http://www.linuxcnc.org/ en suivant le lien de téléchargement.
Si le fichier est trop important pour être téléchargé en une seule fois parce que votre connection Internet est lente ou mauvaise, utilisez wget qui permet la reprise après un téléchargement interrompu.
Ouvrez un terminal. Dans Ubuntu il est dans Applications/Accessoires/Terminal. Notez que le nom du fichier peut être différent de celui de cette documentation, suivez le lien de téléchargement sur http://www.linuxcnc.org/ pour avoir le nom du fichier actuel. Vous pouvez copier le lien puis le coller dans le terminal à l'aide de la souris.
Pour prendre la version Ubuntu 8.04 Hardy Heron copiez ce lien dans le terminal et pressez Entrée:
wget -r http://www.linuxcnc.org/hardy/ubuntu-8.04-desktop-emc2-aj07-i386.iso
Pour prendre la version Ubuntu 6.06 Dapper Drake:
wget -r http://www.linuxcnc.org/iso/emc2.2.2-1-ubuntu6.06-desktop-i386.iso
Pour reprendre un téléchargement interrompu ajoutez l'option -c à wget:
wget -r -c http://www.linuxcnc.org/hardy/ubuntu-8.04-desktop-emc2-aj07-i386.iso
Pour stopper un téléchargement utilisez Ctrl-C ou fermer la fenêtre du terminal.
Après que le téléchargement soit terminé vous trouverez un nouveau répertoire appelé www.linuxcnc.org ou quelque chose de similaire. Dans ce répertoire vous trouverez l'image ISO du CD. Il ne vous restera plus qu'à la graver.
Le programme wget est également disponible pour Windows depuis
http://gnuwin32.sourceforge.net/packages/wget.htm
Suivez les instructions de la page web pour télécharger et installer le programme wget sous Windows.
Pour lancer wget ouvrez la fenêtre DOS.
Dans la plupart des Windows elle est dans Programmes/Accessoires/Commande
Naviguez jusqu'au répertoire dans lequel s'est installé wget.
Habituellement il est dans C:\Program Files\GnuWin32\bin si c'est le cas, tapez la commande:
cd C:\Program Files\GnuWin32\bin
et le prompt devrait changer pour C:\Program Files\GnuWin32>
Tapez les commandes wget dans la fenêtre DOS et pressez Entrée comme précédemment.
EMC2 est distribué sous la forme d'un fichier image de CD, appelée image ISO. Pour installer EMC2, vous devez d'abord graver cette image ISO sur un CD. Vous devez disposer d'un graveur de CD/DVD et d'un CD vierge de 80 minutes (700 Mio). Si la gravure du CD échoue, essayez de le graver à une vitesse plus lente.
Avant de graver un CD, il est fortement recommandé de vérifier la somme de contrôle md5 (hash) du fichier de l'image iso.
Ouvrez un terminal. Dans Ubuntu il est dans Applications/Accessoires/Terminal.
Allez dans le répertoire contenant l'image ISO précédemment téléchargée.
cd répertoire_de_l'image
Puis lancez la commande md5sum suivie du nom du fichier, exemple:
md5sum ubuntu-8.04-desktop-emc2-aj07-i386.iso
La commande md5sum doit retourner une simple ligne après le calcul de la somme de contrôle. Sur une machine lente le calcul peut prendre plusieurs minutes, exemple de retour:
91c5abb84386091e0ff056e9ebc40fdb ubuntu-8.04-desktop-emc2-aj07-i386.iso
Il reste à comparer avec la somme md5 fournie sur la page de téléchargement d'EMC2.
Graver l'image ISO sur un CD
Avant de graver un CD, il est fortement recommandé de vérifier la somme de contrôle md5 (hash) du fichier de l'image iso.
Windows ne dispose pas de programme de contrôle du md5. Vous devrez en installer un pour vérifier la somme de contrôle de l'ISO. Plus d'informations sont disponibles ici:
https://help.ubuntu.com/community/HowToMD5SUM
Gravez l'ISO sur un CD
Avec le CD Live d'EMC2 dans le lecteur de CD/DVD redémarrez votre PC de sorte qu'il démarre sur le CD Live. Quand l'ordinateur a redémarré vous pouvez essayer EMC2 sans l'installer. Vous ne pouvez pas créer de configuration personnalisée ni modifier les réglages du système comme la résolution de l'écran sans installer EMC2.
Pour lancer EMC2 allez dans le menu Applications/CNC et choisissez EMC2. Puis sélectionnez une configuration en sim (simulation) et essayez le.
Pour savoir si votre ordinateur est utilisable par le générateur de trains d'impulsions du logiciel, lancez un test de latence comme indiqué à la section ([.])
Si vous avez envie d'aller plus loin, cliquez juste sur l'icône Install se trouvant sur le bureau, répondez à quelques questions (votre nom, votre fuseau horaire, le mot de passe) et faites une installation complète en quelques minutes. Notez bien le mot de passe indiqué et le nom d'utilisateur. Une fois l'installation compléte et que vous êtes connecté, le gestionnaire de mises à jour vous proposera d'effectuer une mise à jour vers la dernière version stable d'EMC2
L'interface AXIS est une des interfaces parmis lesquelles vous avez à choisir. Elle peut être configurée pour lui ajouter un panneau de commandes virtuel personnalisé en fonction des besoins. AXIS est l'interface utilisateur par défaut et est activement développée.
Avec l'installation normale, si vous êtes en ligne, le gestionnaire de mises à jour vous préviendra quand des mises à jour d'EMC2 et d'Ubuntu seront disponibles, vous pourrez alors facilement mettre votre système à jour sans connaissances particulières de Linux.
Cette section suppose qu'une installation à partir du CD Live a été faite. Après cette installation et avant de continuer, il est recommandé de connecter le PC sur Internet pour y faire les dernières mises à jour. Pour les installations plus complexes se référer au Manuel de l'intégrateur.
Le test de latence détermine la capacité du processeur à répondre aux requêtes qui lui sont faites. Certains matériels peuvent interrompre ce processus, causant des pertes de pas lorsqu'ils pilotent une machine CNC. Ce test est la toute première chose à faire pour valider un PC. Pour le lancer, suivre les instructions de la section ([.]).
Si vous avez une machine Sherline ou Xylotex, vous pouvez sauter cette section et aller directement à la section relative à l'assistant graphique ([.]). EMC fourni une configuration rapide pour les machines Sherline et Xylotex.
Regroupe les informations à propos des axes de la machine.
Les timings des pilotes sont exprimés en nanosecondes. Si vous n'êtes pas sur de vous à propos des timings de votre interface, les caractèristiques des plus populaires sont incluses dans l'assistant graphique de configuration. Notez que les pilotes Gecko ont des timings différents les uns des autres. Une liste des caractèristiques courantes est également maintenue sur le Wiki http://wiki.linuxcnc.org.
| Axes | Type de pilote | Step Time ns | Step Space ns | Direction Hold ns | Direction Setup ns |
| X | |||||
| Y | |||||
| Z |
Regroupe les informations à propos des différentes broches du port parallèle utilisées.
| Pin de sortie | Fonction | Si différent | Pin d'entrée | Fonction | Si différent |
| 1 | Sortie A/U | 10 | Limite et OM X | ||
| 2 | X Step | 11 | Limite et OM Y | ||
| 3 | X Direction | 12 | Limite et OM Z | ||
| 4 | Y Step | 13 | Limite et OM A | ||
| 5 | Y Direction | 15 | Entrée palpeur | ||
| 6 | Z Step | ||||
| 7 | Z Direction | ||||
| 8 | A Step | ||||
| 9 | A Direction | ||||
| 14 | Broche sens horaire | ||||
| 16 | PWM broche | ||||
| 17 | Enable puissance |
Noter que toutes les broches inutilisées doivent être explicitement indiquées Inutilisé dans le choix déroulant de l'assistant. Elles pourront être modifiées par la suite en relançant Stepconf.
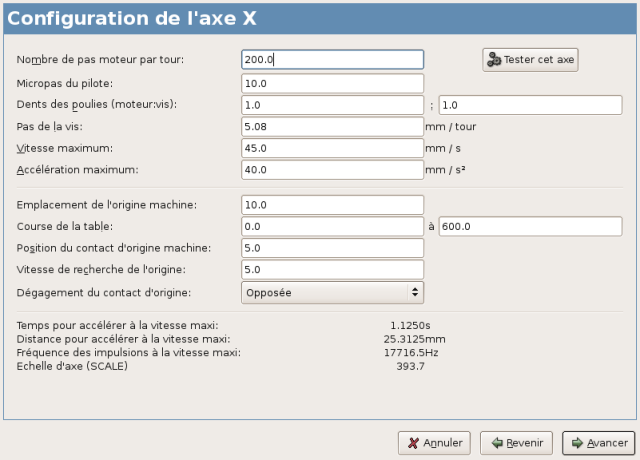
Regroupe les informations à propos des pas de vis et des poulies. Utilisées pour définir la taille d'un pas dans l'unité utilisateur. La taille du pas est utilisée par SCALE dans le fichier .ini.
| Axes | Pas par tour | Micropas | Dents moteur | Dents vis | Pas de la vis |
Pas pas tour: indique combien de pas moteur sont nécessaires pour que celui-ci fasse un tour.
Micropas: indique combien d'impulsions le pilote doit recevoir pour que le moteur tourne d'un angle équivalent à un pas.
Dents moteur et Dents vis: à indiquer si vous avez une réduction poulies/courroie entre le moteur et la vis. Sinon mettez 1 pour les deux.
Pas de la vis: indique combien de tour la vis d'entraînement de l'axe doit faire pour déplacer la table d'une unité utilisateur. Si vous êtes en pouces, c'est le nombre de tours pas pouce, si vous êtes en millimètres, c'est le nombre de tour (ou fraction de tour) par millimètre. Par exemple, pour une vis avec un pas de 5.08mm, il faut 0.1968503937 tour pour faire 1 mm et 5 tours pour faire un pouce.
Voir l'utilisation de l'assistant Stepconf au chapitre ([.])
Il est possible de créer un lien sur le bureau après utilisation de l'assistant Stepconf. Depuis le menu CNC lancer EMC2 et choisir la configuration nouvellement créée dans la liste. Cocher la case Créer un raccourci sur le bureau et valider avec OK. Il est désormais possible de lancer directement cette configuration depuis le lien créé sur le bureau.
Pour modifier quelque chose dans une configuration créée à l'aide de l'assistant Stepconf, relancer celui-ci. Sélectionner Modifier une configuration... Puis choisir le fichier .stepconf à modifier dans le répertoire emc2/configs. L'entête du fichier indique si le fichier peut être édité manuellement ou non.
Stepconf est un programme qui génère des fichiers de configuration EMC pour une classe spécifique de machine CNC: celles qui sont pilotées via un port parallèle standard et contrôlées par des signaux de type step & direction.
D'éventuels traitements des signaux, une opto-isolation ou des filtres RC, peuvent imposer des contraintes de temps supplémentaires aux signaux, il convient de les ajouter à celles du pilote.
Pour chacune des pins, choisir le signal qui correspond au brochage de votre port parallèle. Cochez la case inverser si le signal est inversé (0V pour vrai / actif, 5V pour faux / inactif).
Inclure un panneau PyVCP personnalisé Si coché, le panneau de contrôle PyVCP panel.xml sera affiché dans la partie droite de la fenêtre principale d'AXIS.
Pompe de charge Si votre carte de contrôle gère une pompe de charge, dans la liste déroulante des sorties, sélectionner Pompe de charge sur la sortie qui doit correspondre à l'entrée Pompe de charge de la carte. La sortie pompe de charge sera connectée en interne par Stepconf. Le signal de pompe de charge sera d'environ la moitié de la fréquence maxi des pas affichée sur la page des informations machine.
Ces options ne sont accessibles que quand PWM broche, Phase A codeur broche ou index broche sont configurés sur le brochage du port parallèle.
Si PWM broche apparaît dans le réglage du port parallèle, les informations suivantes doivent être renseignées:
Lorsque les signaux appropriés, provenants d'un codeur de broche, sont connectés au port parallèle, EMC peut être utilisé pour le filetage avec broche synchronisée sur un tour. Ces signaux sont:
Si Phase A codeur broche et Index broche apparaissent dans le réglage des broches du port, l'information suivante doit être renseignée:
Cliquez “Appliquer” pour enregistrer les fichiers de configuration. Ensuite, vous pourrez relancer ce programme et ajuster les réglages entrés précédemment.
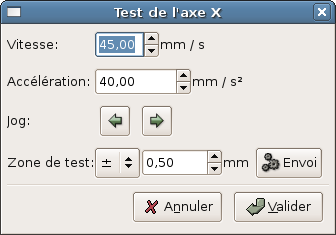
Avec Stepconf il est facile de définir certaines valeurs comme celles de l'accélération et de la vitesse. Entrez d'abord les éléments corrects pour les Pas moteur, les Micropas, les Poulies, et le pas de vis. Puis entrez une valeur aproximative de Vitesse. Enfin, cliquez sur Tester cet axe.
Commencez avec une faible valeur d'accélération (par exemple, 2 in/s^2 ou 50mm/s^2) et la vitesse que vous espérez atteindre. À l'aide des boutons de jog, positionnez l'axe vers son centre. Soyez prudent, car avec peu d'accélération, l'axe peut prendre une surprenante longueur pour ralentir et s'arrêter.
Après avoir mesuré les longueurs de déplacement disponibles dans chaque direction, entrez la moyenne de ces distances dans la zone test, en gardant à l'esprit que, après un décrochage le moteur peut repartir dans la direction inattendue. Cliquez sur Envoi. La machine va commencer à faire des allers et retours sur cet axe. Dans cet essai, il est important que la combinaison entre l'accélération et la zone de test, permette à la machine d'atteindre la vitesse sélectionnée et de s'y déplacer sur, au moins, une courte distance (plus cette distance sera longue, meilleur sera le test). La formule: distance=0.5*vitesse*vitesse/accélération donne la distance minimum requise avec les vitesse et accélération spécifiées. Il est souhaitable de pousser sur la table dans la direction inverse du mouvement pour simuler les efforts de coupe. Si la machine cale, réduire la vitesse et relancer le test.
Si la machine ne présente aucun décrochage, cliquez sur le bouton Exécuter. L'axe revient alors à sa position de départ. Si cette position est incorrecte, c'est que l'axe a calé ou a perdu des pas au cours de l'essai. Réduire la vitesse et relancer le test. Si la machine ne se déplace pas, cale, ou perd des pas même à faible vitesse, vérifiez les éléments suivants:
Une fois que vous avez trouvé une vitesse à laquelle l'axe ne perd plus de pas et à laquelle les mesures sont exactes pendant le test, réduisez la de 10% et utilisez la comme vitesse maximum pour cet axe.
Avec la vitesse maximale que vous avez trouvé à l'étape précédente, entrez une valeur d'accélération approximative. Procédez comme pour la vitesse, en ajustant la valeur d'accélération en plus ou en moins selon le résultat. Dans cet essai, il est important que la combinaison de l'accélération et de la zone test permette à la machine d'atteindre la vitesse sélectionnée. Une fois que vous avez trouvé une valeur à laquelle l'axe ne perd plus de pas pendant le test, la réduire de 10% et l'utiliser comme accélération maximale pour cet axe.
Entrez les valeurs suivantes dans la page de configuration de la broche:
| Vitesse 1: | 0 | PWM 1: | 0 |
| Vitesse 2: | 1000 | PWM 1: | 1 |
Finissez les étapes suivantes de la configuration, puis lancez EMC2 avec votre configuration. Mettez la machine en marche et allez dans l'onglet Données manuelles. démarrez le moteur de broche en entrant: M3 S100. Modifiez la vitesse de broche avec différentes valeurs comme: S800. Les valeurs permises vont de 1 à 1000.
Pour deux différentes valeurs de Sxxx, mesurez la vitesse de rotation réelle de la broche en tours/mn. Enregistrez ces vitesses réelles de la broche. Relancez Stepconf. Pour les Vitesses, entrez les valeurs réelles mesurées et pour les PWM, entrez la valeur Sxxx divisée par 1000.
Parce que la plupart des interfaces ne sont pas linéaires dans leurs courbes de réponse, il est préférable de:
Par exemple, si votre broche tourne entre 0tr/mn et 8000tr/mn, mais que vous l'utilisez généralement entre 400tr/mn et 4000tr/mn, prenez alors des valeurs qui donneront 1600tr/mn et 2800tr/mn.
La course de chaque axe est bien délimitée. Les extrémités physiques d'une course sont appelées les butées mécaniques.
Avant la butée mécanique se trouve un contact de fin de course. Si ce contact est rencontré pendant les opérations normales, EMC coupe la puissance du moteur. La distance entre le fin de course et la butée mécanique doit être suffisante pour permettre au moteur, dont la puissance a été coupée, de s'arrêter malgré l'inertie du mobile.
Avant le contact de fin de course se trouve une limite soft. Cette limite logicielle est introduite après la prise d'origine machine. Si une commande manuelle ou un programme gcode dépasse cette limite, ils ne seront pas éxécutés. Si un mouvement en jog cherche à dépasser la limite logicielle, il sera interrompu sur cette limite.
Le contact d'origine machine peut être positionné n'importe où, le long d'une course (entre les butées mécaniques).
Si aucun mécanisme externe ne désactive la puissance moteur quand un contact de limite est enfoncé, un des contacts de fin de course peut être utilisé comme contact d'origine machine.
La position zéro est la position correspondante au 0 de l'axe dans le système de coordonnées machine. Habituellement la position zéro doit se trouver entre les deux limites soft. Sur les tours, le mode vitesse de surface constante requiert que la coordonnée X=0 corresponde au centre de rotation de la broche quand aucun correcteur d'outil n'est actif.
La position de l'origine est la position, située le long de l'axe, sur laquelle le mobile sera déplacé à la fin de la séquence de prise d'origine. Cette position doit se situer entre les limites soft. En particulier, la position de l'origine ne doit jamais être égale à une limite soft.
Une machine peut être utilisée sans contact de fin de course. Dans ce cas, seules les limites soft empêcheront la machine d'atteindre les butées mécaniques. Les limites soft n'opérent qu'après que la POM soit faite sur la machine. Puisqu'il n'y a pas de contact, la machine doit être déplacée à la main et à l'oeil, à sa position d'origine machine avant de presser le bouton POM des axes ou le sous-menu Machine->Prises d'origines machine->POM de l'axe.
Un machine peut être utilisée sans contact d'origine machine. Si la machine dispose de contacts de fin de courses, mais pas de contact d'origine machine, il est préférable d'utiliser le contact de fin de course comme contact d'origine machine (exemple, choisissez Limite mini + origine X dans le réglage du port). Si la machine ne dispose d'aucun contact, ou que le contact de fin de course n'est pas utilisable pour une autre raison, alors la prise d'origine machine peut être réalisée à la main. Faire la prise d'origine à la main n'est certes pas aussi reproductible que sur des contacts, mais elle permet tout de même aux limites soft d'être utilisables.
Faire générer les impulsions de pas au logiciel présente un grand avantage, c'est gratuit. Quasiment chaque PC dispose d'un port parallèle capable de sortir sur ses broches les signaux de pas générés par le logiciel. Cependant, les générateurs d'impulsions logiciels ont aussi quelques désavantages:
Le temps de latence est le temps nécessaire au PC pour arrêter ce qu'il est en train de faire pour répondre à une requête externe. Dans notre cas, la requête est le battement de coeur périodique qui sert de référence pour les impulsions de pas. Plus la latence est basse, plus le coeur pourra battre vite et donc, plus rapides et plus douces seront les impulsions de pas.
Le temps de latence est beaucoup plus important que la vitesse du µP. Un vieux Pentium II qui répond aux interruptions avec 10 microsecondes entre chacune peut donner de meilleurs résultats qu'un rapide P4 en Hyperthreading.
Le CPU n'est pas le seul facteur déterminant le temps de latence. Les cartes mères, les cartes vidéo, les ports USB et de nombreuses autres choses peuvent détériorer le temps de latence. La meilleure façon de savoir ce qu'il en est sur votre PC est de lancer un latency test de HAL.
Pour exécuter le test, il suffit d'ouvrir une console et de taper: latency-test . Vous devriez voir quelque chose comme ceci:

Pendant que le test est en cours d'exécution, il faut abuser de l'ordinateur. Déplacez les fenêtres sur l'écran. Connectez vous à l'Internet. Copiez quelques gros fichiers sur le disque dur. Jouer de la musique. Lancez une démo OpenGL telle que glxgears. L'idée est de charger le PC au maximum pour que le temps de latence soit mesuré dans le pire des cas. Ne pas exécuter EMC2 ou Stepconf pendant que latency-test est en cours d'exécution.
Le chiffre max jitter dans cet exemple est de 17894 nanosecondes, soit 17.9 microsecondes. Enregistrer ce chiffre et entrez le dans Stepconf quand il le demande.
Dans cet exemple de test de latence il n'a fallu que quelques secondes pour afficher cette valeur. Vous devrez peut être lancer le test pendant plusieurs minutes. Parfois même, dans le pire des cas, rien ne provoque de latence ou seulement des actions particulières. Par exemple, une carte mère Intel marchait très bien la plupart du temps, mais toutes les 64 secondes elle avait une très mauvaise latence de 300µs. Heureusement, il existe un correctif (voir Fixing Dapper SMI Issues)
Alors, que signifient les résultats ? Si le résultat de votre Max Jitter est en dessous d'environ 15-20 microsecondes (15000-20000 nanosecondes), l'ordinateur pourra donner d'excellents résultats avec la génération logicielle des pas. Si le temps de latence est à plus de 30-50 microsecondes, vous aurez de bons résultats, mais la vitesse maximum sera un peu décevante, spécialement si vous utilisez des micropas ou si le pas de votre vis est fin. Si les résultats sont de 100uS ou plus (100,000 nanosecondes), alors le PC n'est pas un bon candidat à la génération des pas. Les résultats supérieurs à 1 milliseconde (1,000,000 nanosecondes) éliminent, dans tous les cas, ce PC pour faire tourner EMC, en utilisant des micropas ou pas.
Notez que si vous obtenez une latence élevée, il peut être possible de l'améliorer. Un PC avait une très mauvaise latence (plusieurs millisecondes) en utilisant la carte graphique interne. Un carte graphique Matrox d'occasion à $5US a résolu le problème. EMC n'exige pas de matériel de pointe.
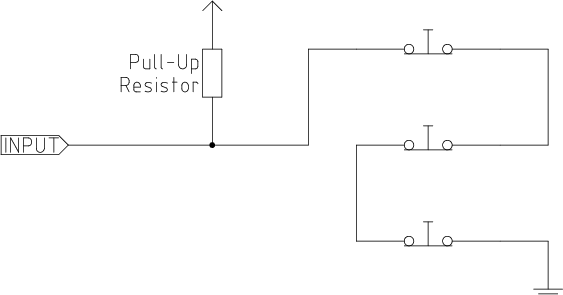
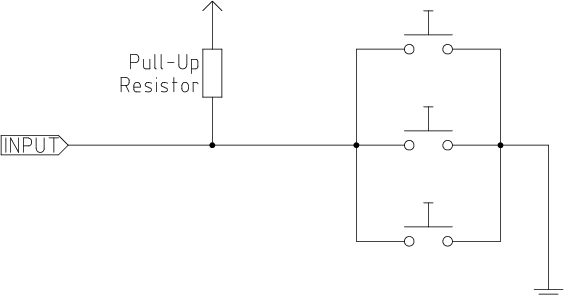
Le câblage idéal des contacts externes serait une entrée par contact. Toutefois, un seul port parallèle d'ordinateur offre un total de 5 entrées, alors qu'il n'y a pas moins de 9 contacts sur une machine 3 axes. Au lieu de cela, plusieurs contacts seront câblés ensemble de diverses façons afin de nécessiter un plus petit nombre d'entrées.
Les figures ci-dessous montrent l'idée générale du câblage de plusieurs contacts à une seule broche d'entrée. Dans chaque cas, lorsqu'un contact est actionné, la valeur vue sur l'entrée va passer d'une logique haute à une logique basse. Cependant, EMC s'attend à une valeur VRAIE quand un contact est fermé, de sorte que les cases Inverser correspondantes devront être cochées sur la page de réglage du port parallèle.
Les combinaisons suivantes sont permises dans Stepconf:
Les deux dernières combinaisons sont également appropriées quand le type contact + origine est utilisé.
Après installation, emc2 se lance comme un autre programme Linux: depuis un terminal en passant la commande emc, ou depuis le sous-menu Applications -> CNC.
Par défaut, le dialogue Sélecteur de configuration s'affichera la première fois que vous lancerez emc. Vos propres configurations personnalisées s'affichent dans le haut de la liste, suivies par les différentes configurations fournies en exemple.2Figure [.] montre l'apparence de la fenêtre du sélecteur de configuration.
Cliquez dans la liste, sur les différentes configurations pour afficher les informations les concernant. Double-cliquez sur une configuration ou cliquez OK pour démarrer EMC2 avec cette configuration. Cochez la case Créer un raccourci sur le bureau puis cliquez OK pour ajouter une icône sur le bureau d'Ubuntu. Cette icône vous permettra par la suite de lancer directement EMC2 avec cette configuration, sans passer par le sélecteur de configuration.
Quand vous choisissez un exemple de configuration dans le sélecteur, un dialogue vous demandera si vous voulez en faire une copie dans votre répertoire home. Si vous répondez oui, un dossier emc2 autorisé en écriture sera créé, il contiendra un jeu de fichiers que vous pourrez éditer pour les adapter à vos besoins. Si vous répondez non, emc démarrera mais pourra se comporter de façon étrange, par exemple, les décalages d'origine pièce entrés avec la commande Toucher ne seront pas pris en compte, ce comportement est lié à ce moment, à l'absence de répertoire autorisé en écriture sans lequel les paramètres ne peuvent être enregistrés.
 Figure: Dialogue de copie de la configuration
Figure: Dialogue de copie de la configurationSi votre machine est pilotée avec des signaux de type: pas et direction (step/dir) via le port parallèle du PC, lisez le chapitre Stepconf. Pour les autres types, trouvez l'exemple de configuration qui utilise la même interface matériel que votre machine et personnalisez la pour l'adapter exactement à votre matériel. Pour cela, faites en une copie dans votre répertoire home (voir chapitre: 1.2) et passez à la lecture du chapitre INI Configuration.
Voici quelques commandes et techniques de base pour l'utilisateur débutant sous Linux. Beaucoup d'autres informations peuvent être trouvées sur le site web ou dans les man pages.
Quand vous installez EMC2 avec le CD-Live Ubuntu, par défaut vous devez passer par la fenêtre de connexion à chaque démarrage du PC. Pour activer le login automatique ouvrez le menu Système ->Administration->Fenêtre de connexion. Si l'installation est récente la fenêtre de connexion peut prendre quelques secondes pour s'ouvrir. Vous devez entrer le mot de passe utilisé pour l'installation pour accéder à la fenêtre des préférences. Ouvrez alors l'onglet Sécurité, cochez la case Activer les connexions automatiques et saisissez votre nom d'utilisateur ou choisissez en un dans la liste déroulante. Vous êtes maintenant dispensé de la fenêtre de connexion.
Les Man pages sont des pages de manuel générées automatiquement le plus souvent. Les Man pages existent pour quasiment tous les programmes et les commandes de Linux.
Pour visualiser une man page ouvrez un terminal depuis Applications > Accessoires > Terminal. Par exemple si vous voulez trouver quelques choses concernant la commande find, tapez alors dans le terminal:
man find
Utilisez les touches Vers le haut et Vers le bas pour faire défiler le texte et la touche Q pour quitter.
En cas de problème il est parfois utile de connaître la liste des modules du noyau qui sont chargés. Ouvrez une console et tapez:
lsmod
Si vous voulez, pour le consulter tranquillement, envoyer le résultat de la commande dans un fichier, tapez la sous cette forme:
lsmod > mes_modules.txt
Le fichier mes_modules.txt résultant se trouvera alors dans votre répertoire home si c'est de là que vous avez ouvert la console.
Editer certains fichiers du système en root peut donner des résultats inattendus! Soyez trés vigilant quand vous éditez en root. Vous pouvez ouvrir et lire de nombreux fichiers systèmes appartenant au root qui sont en mode lecture seule.
Ouvrir un terminal depuis Applications > Accessoires > Terminal.
Dans ce terminal, tapez:
sudo gedit
Ouvrez un fichier depuis Fichiers, Ouvrir puis éditez le.
Pour afficher le chemin du répertoire courant dans le terminal tapez:
pwd
Pour remonter dans le répertoire précédent, tapez dans le terminal:
cd ..
Pour remonter de deux niveaux de répertoire, tapez dans le terminal:
cd ../..
Pour aller directement dans le sous-répertoire emc2/configs tapez:
cd emc2/configs
Pour voir le contenu du répertoire courant tapez:
dir
ou
ls
La commande find peut être un peu déroutante pour le nouvel utilisateur de Linux. La syntaxe de base est:
find répertoire_de_départ paramètres actions
Par exemple, pour trouver tous les fichiers .ini dans votre répertoire emc2 utilisez d'abord la commande pwd pour trouver le répertoire courant. Ouvrez un nouveau terminal et tapez:
pwd
il vous est retourné par exemple le résultat suivant:
/home/robert
Avec cette information vous pouvez taper, par exemple, la commande:
find /home/robert/emc2 -name *.ini -print
Le -name est le nom de fichier que vous recherchez et le -print indique à find d'afficher le résultat dans le terminal. Le *.ini indique à find de retourner tous les fichiers contenant l'extension .ini
Tapez dans un terminal:
grep -i -r 'texte à rechercher' *
Pour trouver tous les fichiers contenant le texte 'texte à rechercher' dans le répertoire courant et tous ses sous-répertoires et en ignorant la casse. Le paramètre -i demande d'ignorer la casse et le -r demande une recherche récursive (qui inclus tous les sous-répertoires dans la recherche). Le caractère * est un jocker indiquant tous les fichiers.
Pour visualiser les messages du boot utilisez la commande dmesg depuis un terminal. Pour enregistrer ces messages dans un fichier redirigez les avec:
dmesg > dmesg.txt
Le contenu de ce fichier pourra alors être copié et collé à destination des personnes en ligne qui vous aideront à diagnostiquer votre problème.
Pour voir la liste du matériel utilisé par votre carte mère, tapez la commande suivante dans un terminal:
lspci -v
Lors de l'installation d'Ubuntu les réglages du moniteur sont détectés. Il peut arriver que ça fonctionne mal et que la résolution ne soit que celle d'un moniteur générique en 800x600.
Pour résoudre ce cas, suivez les instructions données ici:
https://help.ubuntu.com/community/FixVideoResolutionHowto
Copyright (c) 2000 LinuxCNC.org
Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version 1.1 or any later version published by the Free Software Foundation; with no Invariant Sections, no Front-Cover Texts, and one Back-Cover Text: "This EMC Handbook is the product of several authors writing for linuxCNC.org. As you find it to be of value in your work, we invite you to contribute to its revision and growth." A copy of the license is included in the section entitled "GNU Free Documentation License". If you do not find the license you may order a copy from Free Software Foundation, Inc. 59 Temple Place, Suite 330, Boston, MA 02111-1307
GNU Free Documentation License Version 1.1, March 2000
Copyright (C) 2000 Free Software Foundation, Inc. 59 Temple Place, Suite 330, Boston, MA 02111-1307 USA Everyone is permitted to copy and distribute verbatim copies of this license document, but changing it is not allowed.
0. PREAMBLE
The purpose of this License is to make a manual, textbook, or other written document "free" in the sense of freedom: to assure everyone the effective freedom to copy and redistribute it, with or without modifying it, either commercially or noncommercially. Secondarily, this License preserves for the author and publisher a way to get credit for their work, while not being considered responsible for modifications made by others.
This License is a kind of "copyleft", which means that derivative works of the document must themselves be free in the same sense. It complements the GNU General Public License, which is a copyleft license designed for free software.
We have designed this License in order to use it for manuals for free software, because free software needs free documentation: a free program should come with manuals providing the same freedoms that the software does. But this License is not limited to software manuals; it can be used for any textual work, regardless of subject matter or whether it is published as a printed book. We recommend this License principally for works whose purpose is instruction or reference.
1. APPLICABILITY AND DEFINITIONS
This License applies to any manual or other work that contains a notice placed by the copyright holder saying it can be distributed under the terms of this License. The "Document", below, refers to any such manual or work. Any member of the public is a licensee, and is addressed as "you".
A "Modified Version" of the Document means any work containing the Document or a portion of it, either copied verbatim, or with modifications and/or translated into another language.
A "Secondary Section" is a named appendix or a front-matter section of the Document that deals exclusively with the relationship of the publishers or authors of the Document to the Document's overall subject (or to related matters) and contains nothing that could fall directly within that overall subject. (For example, if the Document is in part a textbook of mathematics, a Secondary Section may not explain any mathematics.) The relationship could be a matter of historical connection with the subject or with related matters, or of legal, commercial, philosophical, ethical or political position regarding them.
The "Invariant Sections" are certain Secondary Sections whose titles are designated, as being those of Invariant Sections, in the notice that says that the Document is released under this License.
The "Cover Texts" are certain short passages of text that are listed, as Front-Cover Texts or Back-Cover Texts, in the notice that says that the Document is released under this License.
A "Transparent" copy of the Document means a machine-readable copy, represented in a format whose specification is available to the general public, whose contents can be viewed and edited directly and straightforwardly with generic text editors or (for images composed of pixels) generic paint programs or (for drawings) some widely available drawing editor, and that is suitable for input to text formatters or for automatic translation to a variety of formats suitable for input to text formatters. A copy made in an otherwise Transparent file format whose markup has been designed to thwart or discourage subsequent modification by readers is not Transparent. A copy that is not "Transparent" is called "Opaque".
Examples of suitable formats for Transparent copies include plain ASCII without markup, Texinfo input format, LaTeX input format, SGML or XML using a publicly available DTD, and standard-conforming simple HTML designed for human modification. Opaque formats include PostScript, PDF, proprietary formats that can be read and edited only by proprietary word processors, SGML or XML for which the DTD and/or processing tools are not generally available, and the machine-generated HTML produced by some word processors for output purposes only.
The "Title Page" means, for a printed book, the title page itself, plus such following pages as are needed to hold, legibly, the material this License requires to appear in the title page. For works in formats which do not have any title page as such, "Title Page" means the text near the most prominent appearance of the work's title, preceding the beginning of the body of the text.
2. VERBATIM COPYING
You may copy and distribute the Document in any medium, either commercially or noncommercially, provided that this License, the copyright notices, and the license notice saying this License applies to the Document are reproduced in all copies, and that you add no other conditions whatsoever to those of this License. You may not use technical measures to obstruct or control the reading or further copying of the copies you make or distribute. However, you may accept compensation in exchange for copies. If you distribute a large enough number of copies you must also follow the conditions in section 3.
You may also lend copies, under the same conditions stated above, and you may publicly display copies.
3. COPYING IN QUANTITY
If you publish printed copies of the Document numbering more than 100, and the Document's license notice requires Cover Texts, you must enclose the copies in covers that carry, clearly and legibly, all these Cover Texts: Front-Cover Texts on the front cover, and Back-Cover Texts on the back cover. Both covers must also clearly and legibly identify you as the publisher of these copies. The front cover must present the full title with all words of the title equally prominent and visible. You may add other material on the covers in addition. Copying with changes limited to the covers, as long as they preserve the title of the Document and satisfy these conditions, can be treated as verbatim copying in other respects.
If the required texts for either cover are too voluminous to fit legibly, you should put the first ones listed (as many as fit reasonably) on the actual cover, and continue the rest onto adjacent pages.
If you publish or distribute Opaque copies of the Document numbering more than 100, you must either include a machine-readable Transparent copy along with each Opaque copy, or state in or with each Opaque copy a publicly-accessible computer-network location containing a complete Transparent copy of the Document, free of added material, which the general network-using public has access to download anonymously at no charge using public-standard network protocols. If you use the latter option, you must take reasonably prudent steps, when you begin distribution of Opaque copies in quantity, to ensure that this Transparent copy will remain thus accessible at the stated location until at least one year after the last time you distribute an Opaque copy (directly or through your agents or retailers) of that edition to the public.
It is requested, but not required, that you contact the authors of the Document well before redistributing any large number of copies, to give them a chance to provide you with an updated version of the Document.
4. MODIFICATIONS
You may copy and distribute a Modified Version of the Document under the conditions of sections 2 and 3 above, provided that you release the Modified Version under precisely this License, with the Modified Version filling the role of the Document, thus licensing distribution and modification of the Modified Version to whoever possesses a copy of it. In addition, you must do these things in the Modified Version:
A. Use in the Title Page (and on the covers, if any) a title distinct from that of the Document, and from those of previous versions (which should, if there were any, be listed in the History section of the Document). You may use the same title as a previous version if the original publisher of that version gives permission. B. List on the Title Page, as authors, one or more persons or entities responsible for authorship of the modifications in the Modified Version, together with at least five of the principal authors of the Document (all of its principal authors, if it has less than five). C. State on the Title page the name of the publisher of the Modified Version, as the publisher. D. Preserve all the copyright notices of the Document. E. Add an appropriate copyright notice for your modifications adjacent to the other copyright notices. F. Include, immediately after the copyright notices, a license notice giving the public permission to use the Modified Version under the terms of this License, in the form shown in the Addendum below. G. Preserve in that license notice the full lists of Invariant Sections and required Cover Texts given in the Document's license notice. H. Include an unaltered copy of this License. I. Preserve the section entitled "History", and its title, and add to it an item stating at least the title, year, new authors, and publisher of the Modified Version as given on the Title Page. If there is no section entitled "History" in the Document, create one stating the title, year, authors, and publisher of the Document as given on its Title Page, then add an item describing the Modified Version as stated in the previous sentence. J. Preserve the network location, if any, given in the Document for public access to a Transparent copy of the Document, and likewise the network locations given in the Document for previous versions it was based on. These may be placed in the "History" section. You may omit a network location for a work that was published at least four years before the Document itself, or if the original publisher of the version it refers to gives permission. K. In any section entitled "Acknowledgements" or "Dedications", preserve the section's title, and preserve in the section all the substance and tone of each of the contributor acknowledgements and/or dedications given therein. L. Preserve all the Invariant Sections of the Document, unaltered in their text and in their titles. Section numbers or the equivalent are not considered part of the section titles. M. Delete any section entitled "Endorsements". Such a section may not be included in the Modified Version. N. Do not retitle any existing section as "Endorsements" or to conflict in title with any Invariant Section.
If the Modified Version includes new front-matter sections or appendices that qualify as Secondary Sections and contain no material copied from the Document, you may at your option designate some or all of these sections as invariant. To do this, add their titles to the list of Invariant Sections in the Modified Version's license notice. These titles must be distinct from any other section titles.
You may add a section entitled "Endorsements", provided it contains nothing but endorsements of your Modified Version by various parties--for example, statements of peer review or that the text has been approved by an organization as the authoritative definition of a standard.
You may add a passage of up to five words as a Front-Cover Text, and a passage of up to 25 words as a Back-Cover Text, to the end of the list of Cover Texts in the Modified Version. Only one passage of Front-Cover Text and one of Back-Cover Text may be added by (or through arrangements made by) any one entity. If the Document already includes a cover text for the same cover, previously added by you or by arrangement made by the same entity you are acting on behalf of, you may not add another; but you may replace the old one, on explicit permission from the previous publisher that added the old one.
The author(s) and publisher(s) of the Document do not by this License give permission to use their names for publicity for or to assert or imply endorsement of any Modified Version.
5. COMBINING DOCUMENTS
You may combine the Document with other documents released under this License, under the terms defined in section 4 above for modified versions, provided that you include in the combination all of the Invariant Sections of all of the original documents, unmodified, and list them all as Invariant Sections of your combined work in its license notice.
The combined work need only contain one copy of this License, and multiple identical Invariant Sections may be replaced with a single copy. If there are multiple Invariant Sections with the same name but different contents, make the title of each such section unique by adding at the end of it, in parentheses, the name of the original author or publisher of that section if known, or else a unique number. Make the same adjustment to the section titles in the list of Invariant Sections in the license notice of the combined work.
In the combination, you must combine any sections entitled "History" in the various original documents, forming one section entitled "History"; likewise combine any sections entitled "Acknowledgements", and any sections entitled "Dedications". You must delete all sections entitled "Endorsements."
6. COLLECTIONS OF DOCUMENTS
You may make a collection consisting of the Document and other documents released under this License, and replace the individual copies of this License in the various documents with a single copy that is included in the collection, provided that you follow the rules of this License for verbatim copying of each of the documents in all other respects.
You may extract a single document from such a collection, and distribute it individually under this License, provided you insert a copy of this License into the extracted document, and follow this License in all other respects regarding verbatim copying of that document.
7. AGGREGATION WITH INDEPENDENT WORKS
A compilation of the Document or its derivatives with other separate and independent documents or works, in or on a volume of a storage or distribution medium, does not as a whole count as a Modified Version of the Document, provided no compilation copyright is claimed for the compilation. Such a compilation is called an "aggregate", and this License does not apply to the other self-contained works thus compiled with the Document, on account of their being thus compiled, if they are not themselves derivative works of the Document.
If the Cover Text requirement of section 3 is applicable to these copies of the Document, then if the Document is less than one quarter of the entire aggregate, the Document's Cover Texts may be placed on covers that surround only the Document within the aggregate. Otherwise they must appear on covers around the whole aggregate.
8. TRANSLATION
Translation is considered a kind of modification, so you may distribute translations of the Document under the terms of section 4. Replacing Invariant Sections with translations requires special permission from their copyright holders, but you may include translations of some or all Invariant Sections in addition to the original versions of these Invariant Sections. You may include a translation of this License provided that you also include the original English version of this License. In case of a disagreement between the translation and the original English version of this License, the original English version will prevail.
9. TERMINATION
You may not copy, modify, sublicense, or distribute the Document except as expressly provided for under this License. Any other attempt to copy, modify, sublicense or distribute the Document is void, and will automatically terminate your rights under this License. However, parties who have received copies, or rights, from you under this License will not have their licenses terminated so long as such parties remain in full compliance.
10. FUTURE REVISIONS OF THIS LICENSE
The Free Software Foundation may publish new, revised versions of the GNU Free Documentation License from time to time. Such new versions will be similar in spirit to the present version, but may differ in detail to address new problems or concerns. See http:///www.gnu.org/copyleft/.
Each version of the License is given a distinguishing version number. If the Document specifies that a particular numbered version of this License "or any later version" applies to it, you have the option of following the terms and conditions either of that specified version or of any later version that has been published (not as a draft) by the Free Software Foundation. If the Document does not specify a version number of this License, you may choose any version ever published (not as a draft) by the Free Software Foundation.
ADDENDUM: How to use this License for your documents
To use this License in a document you have written, include a copy of the License in the document and put the following copyright and license notices just after the title page:
Copyright (c) YEAR YOUR NAME. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version 1.1 or any later version published by the Free Software Foundation; with the Invariant Sections being LIST THEIR TITLES, with the Front-Cover Texts being LIST, and with the Back-Cover Texts being LIST. A copy of the license is included in the section entitled "GNU Free Documentation License".
If you have no Invariant Sections, write "with no Invariant Sections" instead of saying which ones are invariant. If you have no Front-Cover Texts, write "no Front-Cover Texts" instead of "Front-Cover Texts being LIST"; likewise for Back-Cover Texts.
If your document contains nontrivial examples of program code, we recommend releasing these examples in parallel under your choice of free software license, such as the GNU General Public License, to permit their use in free software.
1 ndt: les termes sont laissés dans la langue d'origine pour correspondre aux documentations des constructeurs. back
2 Etant donné que chaque exemple de configuration utilise un type différent d'interface matérielle, la plupart ne fonctionneront pas sur votre système. Les configurations listées dans la catégorie Sim (simulation) fonctionneront toutes, même sans matériel raccordé. back